|
AUTONOMOUS SOLAR VESSEL |
|
||||||||||||||||||||||||||||||||
|
TRUE AUTONOMY - demands a serious rethink of ship design where robotic automation (Artificial Intelligence at a high level) is essential to remain competitive in the business world. For example, autonomous underwater robots routinely inspect ship hulls and survey the oceans. Robots have become essential tools of the trade, helping humans to do things better and quicker. The time is now to develop a practical blue water high endurance robot system as the next stage of marine evolution, to incorporate Super AIS as the next level of navigation safety.
BUSINESS OPPORTUNITY - Many countries have realised that the first manufacturer to offer true autonomy to fleet operators will have the competitive edge in a virgin market. The technology to build the prototype demonstrator is available within the UK. Present potential project partners are specialists is the field with the know how to deliver a vessel and system that is the springboard for SOLAS and COLREGs compliant autonomous ships of tomorrow.
Robot ships with ZCC platforms could carry out a number of functions today cheaper and cleaner than manned equivalents. The problems this partnership has to overcome for that to be a viable proposition are:
1. Complying with the rules of the ocean (avoiding other ships) and 2. Supplying power for extended endurance autonomy.
THE PRESENT - Autonomous surface vessels today (ASVs) and Autonomous Underwater Vessels (AUVs) do not have to comply with Collision Regulations (COLREGS), nor carry AIS instruments because they are either piloted remotely, operated subsurface or are small enough to escape such obligations. The systems on these vessels might be acceptable to the military or for limited underwater use, but are not suitable for surface merchant shipping fleets or passenger ships that must by law observe COLREGS and carry AIS equipment.
IMMEDIATE PRODUCT - There is a market for a moderate speed (7-12 knot) high endurance Hydrographic and Oceanographic research/survey ship. The need for such product is that the oceans need constant bio-chemical monitoring and oil companies require detailed surveys for ongoing exploration. The stop start AUVs and 1/2 knot seagliders provide much information, but a truly autonomous ship operating at several times current survey speeds will accelerate information gathering.
ASV PLATFORM - The effectiveness of an ASV depends on its endurance. Endurance is governed by the onboard fuel source, which determines range. In the case of a robot survey ship, that might easily be a 365 day mission or more. If you had a diesel engine as the prime mover for such a long endurance mission you'd need an unrealistically large fuel tank, ruling them out and nuclear power is not a viable or ecological alternative..
SOLAR POWER - The direct conversion of sunlight is capable of providing sufficient electrical power for serious oceanographic duties, propulsion, sensors, computers and satellite operation, provided that the design supports 2 or more kw/hr per ton of vessel. The SWASH design study shown below theoretically exceeds this requirement, with a stable triple hull and sun tracking, placing the solar arrays high above the waves. Renewable energy harvested at this level is combined with an active hull, for variable displacement and minimum wetted area while running.
HUMAN ERROR - We can never totally eliminate human error, which is nearly always the cause of marine accidents. But we can reduce it significantly by retro fitting the developed autonomous navigation system to existing fleets. This will entail the production of a break-out box, that accepts industry standard connectors. In a future world of autonomous ships, the real problem for autonomous ships is not other autonomous ships, it is ships commanded by humans. Humans are prone to lapses of concentration and panic moves. Robots just carry out instructions and perform tasks thousands of times more accurately and faster than any human.
MARINE LAW - At the end of an 'autonomous' vessel is the human owner - the person who initiates a mission. Where a number of autonomous vessels are being operated at the same time, it would pay to advantage such fleet with a marine traffic control which would at that time be possible. It is proposed that this ideal is incorporated early in the electronic development stage, for future expansion.
MAX ENERGY LIMITED - Promotes green technology, now assisting Bluebird Marine Systems Ltd with the project where the development is so important for marine operations, a hands on approach (that is sure to involve an element of international lobbying) has been adopted. The 'SNav' project is to develop a robotic ship system to encompass the above: Extended endurance missions and Safer navigation. Fleet operators will have the choice that they do not have today. The choice to equip their vessels with computer monitoring at a new level that could virtually eliminate human error, and also stands to increase the efficiency of their ships navigation (course) wise for fuel and other operational cost savings.
|
|||||||||||||||||||||||||||||||||
|
. |
|
|
|||||||||||||||||||||||||||||||
|
. |
|
|
|||||||||||||||||||||||||||||||
|
ACCIDENTS AT SEA 2012
On the 5th of December 2012, the Baltic Ace collided with another vessel, killing 5 crew members, with others un-recovered - the ship and cargo a total loss. On 13 January 2012 in calm seas and overcast weather, the Costa Concordia struck a rock off the coast of Italy 62 miles from Rome killing 32 passengers - the liner being scrapped. Autonomous monitoring could have prevented these accidents.
It is events like these that gave us cause to extend what was a simple race to now include autonomy. There are still too many accidents at sea. In 1737 the Board of Longitude convened to consider John Harrisons's concept to solve the longitude problem for precisely the same reasons: too many accidents at sea.
Existing technology can solve this problem. But, just like the inventor of the marine chronometer, we need financial support from industry. There is no Board of Longitude today.
We have cooperation from educational institutions and specialist firms and individuals as part of a collaborative team effort (though please get in touch if you want to get involved). We need commercial partners - so please get in touch today if you are interested in helping us to develop the navigation system of the future. See the contact details at the foot of this page.
TSB TARGETS - MARITIME INNOVATION
Marine Safety: Large ships in particular could benefit in short order from enhanced levels of autonomous sensing. That might equate to:-
A. Reduced manning levels and an increase in safety B. Better course keeping C. Enhanced communications D. Increase in safety E. Fuel savings of between 5-25% F. Better voyage planning for precise port berthing (similar to air traffic control) G. Simplified integration for semi-autonomy
There is little published work on enhancing engine control systems, linked to autonomous course keeping techniques, such as to give better voyage management, with an eye on reducing fuel consumption as may be the case when a vessel arrives at port exactly when it can enter a free berth. Such autonomy could potentially yield 5% operating cost savings for larger shipping fleet operators.
A project such as this is a test-bed for soft and hardware that might improve autonomy (control algorithm development) in the short term for container ships and oil tankers. Small scale models may not offer real time simulations. The SolarNavigator project is a intermediate stage development test-bed for the above, irrespective of our ultimate goal of a world circumnavigation. Simply because we must learn to walk before we can run.
GLOBAL PROJECT SUBDIVISIONS
1. Building/testing a hull platform (vessel) capable of a truly autonomous operation. 2. Equipping and fitting out the vessel to be able to steer itself and adapt to changing weather conditions automatically: Storm anchors, Collector lockdown, Self righting, etc. A true Robot Ship: Bruce. 3. Installing the remote controls for manual (drone mode) override, checks, or Autonomous Mission upgrades. 4. Installing the AI computer hardware. 5. Installing the navigation instruments: GPS, Compass, Inertia, Radar, Sonar, Weatherfax, etc 6. Installing the electronic control and feedback sensors: Distance, Infra Red, Audio, Cameras, etc. 7. Weaponry, self defence against unwanted visitors: At this stage simply include mountings in the hull design. 8. Writing the software to make the package a cohesive whole (Captain Nemo) - the Mission. Artificial Intelligence. 9. Testing the systems (obstacle course) in a locally controlled environment. 10. Staging a short duration navigation event: such as the Circumnavigation of an Island. 11. Staging an endurance event to demonstrate the technology. 12.
Melding the hard/software onboard system with a shore-based control station.
1. TANK TEST MODEL PROGRESS - This is stage one of testing the new hull configuration that is capable of genuine autonomous running. The SWATH (Small Waterplane Area Twin Hull) designs tried so far were not a new concept in naval engineering, but they are relatively under-developed. SWATH resolves or reduces many issues that plague other surface hull designs such as monohulls and catamarans, which suffer from uncontrolled pitch, roll, and or heaving. The first and second SolarNavigator tank test models were SWATH boats, where the traditional four foils, one at each corner of the boat, were replaced with two medium length foils at the center of pitch, supplemented with an active ballast transfer system, to adjust trim to changing circumstances.
The theory of these SWATH designs is proven (they worked), but in practice distribution of mass in the first two test models was too fine in practical (our definition) terms - demanding constant adjustment. To solve this problem, one of our designers tried a number of add on devices, but this inevitably increased wetted area and complexity such that it was decided to go back to basics (that designer was self taught) and worked through catamaran and trimaran hulls, to get a feel for the bench marks and the kind of performance a decent wave piercing hull could offer.
The present design came as a flash of inspiration, while a designer was literally playing with some polycarbonate soft drink bottles and alloy welding wire. He noticed that a single semi-submerged hull, giving a reduced wetted area, had all the qualities he was looking for, save roll stability, which he solved as any Hawaiian native will tell you, with outriggers. After that it was working out how to mount a tennis court's worth of solar panels above the salty sea, while keeping air drag down, the center of roll low down, and the center of buoyancy as high as possible - again for stability - protection from capsize.
2. BRUCE THE AUTOPILOT & A BIT MORE - Development of the basic autonomous steering controls depends on a proportional rudder and motor speed controller. This system would provide control in a similar manner to the remote (radio) control systems used for models, through general throttle and rudder commands. By being fed the output of the boat state it would calculate the necessary commands and feed them back into the system creating a closed loop. With an origin and destination provided, and constant waypoint comparison with the boat's actual position, the distance and direction between them can be easily calculated and corrections made - several times a second if necessary. Bruce also self rights the boat in the unlikely event of capsize.
3. STAR WARS - DRONE SATELLITE REMOTE CONTROL, MANUAL OVERRIDE - You can download an Android application for your mobile phone to radio control toy robots. MIT and Cambridge University have used a mobile phone to remotely pilot a helicopter via satellite. Typically the control of something like a ship or a drone plane or boat is done at a dedicated workstation.
4. HAL COMPUTER HARDWARE - What type of computers will be the most suitable for this project? With the current state of the art, an ordinary laptop will suffice, so long as it is capable of interfacing with the range of sensors and has sufficient inputs.
5. NAVIGATION INSTRUMENTS - Speed, Depth, Wind speed, Clinometers, Radar, Sonar, Temperature, Compass.
6. THE EYES AND EARS - HAWKEYE - Cameras, Microphones, Proximity sensors, Laser range finders. There are many toys on the market that do much the same job, from $30. The difference is the level of complexity and the sensitivity and range of the 'eyes and ears.'
7. SCORPION SELF DEFENCE - A BIG STICK (not this call) - Threat detection (early warning), Arming, Warning intruders, Disarming intruders. Literally, the sting in SolarNavigator's tail. A laser can delicately etch the skin of a pirate, melt his gun, or sink his ship. It's the pirates choice as to how much restraint he is willing to suffer.
Several military subcontractors are working on lasers that shoot down missiles and planes, such as BAE Systems, Lockheed Martin and Northrop Grumman. The trouble is that these lasers weigh over 10,000lbs. Such a bulky weapon would be of no use on the SolarNavigator - but then we are talking about 100kW to obliterate missiles, etc.
Power levels are not the only measure of a laser weapons ability. To create an effective weapon, the laser must be integrated into a complete system that can acquire, track and destroy targets and is fully mated with its carrying platform’s power, control, and other systems. Military contracts are unlikely to see major advances in reducing system mass due to budgetary constraints. SolarNavigator already has a massive onboard power generator - the ship is one big solar generator.
8. CAPTAIN NEMO - ARTIFICIAL INTELLIGENCE - An apt name for the software that binds the individual robotic systems, into an artificially intelligent surface craft. Captain Nemo pilots the SolarNavigator like a real skipper. The computer system reacts to real time situations well in advance, tracking the operating environment constantly - unlike the lookouts on the Titanic.
9. LOCAL NAVIGATION EVENT - This is an obstacle course in controlled conditions to test the boats ability to identify and adapt to changing circumstances in real time, while also completing a mission, to include:
* Identifying and steering around obstacles in the water. * Rendering assistance to a man overboard. * Identifying, warning intruders and even sinking a pirate ship (if we include Scorpion). * Capsize and self-righting.
10. INTERMEDIATE CIRCUMNAVIGATION - Ideally this should be a small island or country as a staging post that will test the various capabilities of the SolarNavigator vessel when confronted by changing conditions:
* Hull Integrity * Basic Motor Drive Reliability * Energy Collection, Storage & Management * Navigation Autopilot Systems * Autonomous Sensors & Computer Systems
This is divided between the boat platform and the control systems for complete autonomy.
11. THE AUTONOMOUS ENDURANCE EVENT - We've a long way to go before this epic voyage of discovery, but looking back, we've also come a long way. In reality the original project 1st stage has been completed for us by the PlanetSolar Turanor team. That could have been us, but fate stepped in, and now we have again taken up the torch, building on the shoulders of our fellow mariners. It's an Olympian engineering relay. One country passes the torch to another and each team plays their part. No man is an island.
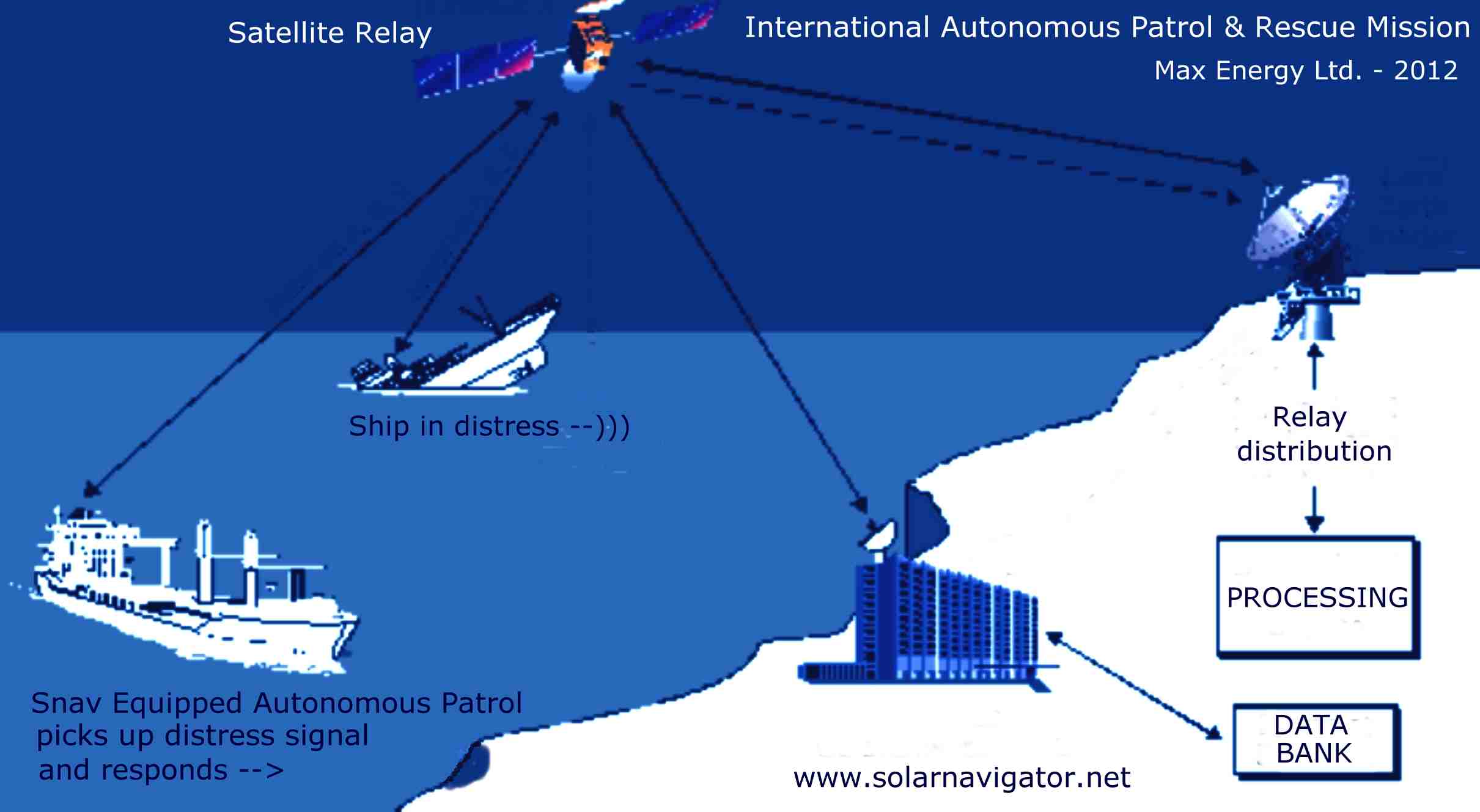
12. SNAV - The system that we envisage is firstly dedicated to complete autonomy - which includes independence from all other systems (in the interests of self-preservation of an operators ship and cargo - every man for himself). That said, a further layer of protection for any autonomous ship, is to be able to share information of the marine highways as a two way stream, with a shore based traffic control. In particular, a computer system that monitors the course of any ship equipped with the autonomous package derived from our own or other compatible research, where any deviation from course (or other dangers) alerts a human operator, as well as engaging other automatic signals.
This (or a similar) concept is under development by the MonaLisa 2 team, focusing on the congested Baltic Sea routes. It would make sense to partner such global project to further the aims of the EU and its e-maritime (MOS) initiative.
COLLISION AT SEA REGS = REAL WORLD INTERFACE
The International Rules for Prevention of Collisions at Sea (COLGREGs) define a 'vessel' as: " carrying passengers or cargo." Since SolarNavigator can carry passengers and cargo, the COLREGs will apply. Hardware will be installed and software will be written to not only comply with COLREGS, but to exceed the rules. One of our directors, an ex BP tanker navigation officer told us some wild stories about other ships at seas that don't follow the correct procedures. We may have to re-write our own version of COLREGs - and that is what this research is all about. First of all complying with existing rules, then seeing how new technology (autonomy) might improve safety at sea. This is likely to involve legal analysis and cooperation with the IMO and other organisations, who might be interested in advancing navigation safety. An autonomous circumnavigation could re-write the rules of navigation.
BACKGROUND
At the time of writing, there are several competitions aimed at getting an autonomous surface vessel across the Atlantic Ocean. In the US there is the RoboBoat competition. These competitions are for small ( model) sailing and solar powered boats.
Autonomy is making a craft that does not need a human on board to carry out a navigation mission. The ship then becomes a robot with a series of interrelated programs: Typically consisting of code to do this, except for that. We believe that our autonomous ship will prove to be safer than manned ships.
OTHER AUTONOMOUS PROJECTS
2. University of Washington - Seaglider 3. Slocum sea glider - Doug Webb & Henry Stommel 4. MIT Cambridge University - Controlling Drone with Mobile Phone 5. Scout Transatlantic - autonomous robot Atlantic crossing project (current endurance record holder 2013) 6. Roboboats - Autonomous Surface Boats competition, ASVs 7. Robosubs - Autonomous Underwater Vessel competition AUVs 8. USNA - Roboboat competition team 2011 & 2012 9. Sea Robotics - Unmanned systems 10. Woods Hole Oceanographic Institution - ABE lost at sea 11. University Western Australia - USAL robot sub 12. Microtransat - Competition for autonomous sailing models 13. CMTI - Centre for Maritime Technology and Innovation - Autonomous Study 14. MUNIN - Maritime Unmanned Navigation through Intelligence in Networks & E-Nav International 7th Framework 15. MONALISA - Motorways of the Sea, eco-efficient e-navigation solutions contribution to safe maritime transport 16. INDAGATUS - Small endurance UMV platform 17. ROLLS ROYCE - Unmanned and drone cargo ships
OTHER LOW DRAG ( and interesting) PLATFORMS
1. Proteus MAR - inflatable catamaran with suspension 2. GHOST - Juliet Marine SWATH 3. CHARC - Lockheed Martin SWATH
WHY
DO WE CARE?
LINKS
www.eng.uah.edu/~fahimi/Platform_Boat.html www.gps4us.com/GPS-independent-navigation-system for autonomous vessels http://en.wikipedia.org/wiki/Geodetic_system http://en.wikipedia.org/wiki/ECEF www.apl.washington.edu/projects/seaglider/summary http://www.apl.washington.edu/projects/seaglider/summary.html http://www.kickstarter.com/projects/robotboat/robotboat-mark-vi Innovateuk competition vessel efficiency piloting uk marine maritime http://www.guidance.eu.com/ui/content/content.aspx?id=229 http://www.babcockinternational.com/ Maritime Professional Blogs Maritime Musings Dec 2012 Dynamic positioning
|
|||||||||||||||||||||||||||||||||
|
This website is copyright © 1991- 2015 Electrick Publications. All rights reserved. The bird logo and names Solar Navigator and Blueplanet Ecostar are trademarks ™. The Blueplanet vehicle configuration is registered ®. All other trademarks hereby acknowledged and please note that this project should not be confused with the Australian: 'World Solar Challenge'™which is a superb road vehicle endurance race from Darwin to Adelaide. Max Energy Limited is an educational charity working hard to promote world peace.
|
|||||||||||||||||||||||||||||||||