|
SLOCUM (JOSHUA) SEA GLIDER Douglas Webb & Henry Stommel
|
|
|
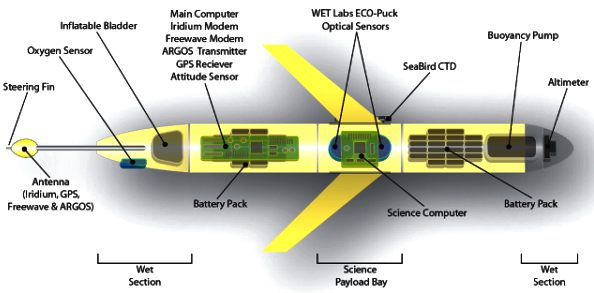
SLOCUM SEA GLIDER
Conceived by Douglas C. Webb and supported by Henry Stommel and others, the class of Slocum Gliders is named after Joshua Slocum, the first man to single-handedly sail around the world.
ABSTRACT - This report presents the design features, computer-simulated and actual field trial gliding and autopilot performance of the first two models in the ongoing evolution of the SLOCUM glider vehicle. The vehicle mission is to gather oceanographic data while performing autonomous, gliding dives to 1800 m depth at typical glide path angles of 45° with the horizontal, and a sink rate of .33 m/sec.
LINKS
www.eng.uah.edu/~fahimi/Platform_Boat.html www.gps4us.com/GPS-navigation-autonomous-vessels http://en.wikipedia.org/wiki/Geodetic_system http://en.wikipedia.org/wiki/ECEF www.apl.washington.edu/projects/seaglider/summary http://www.uberreview.com/2008/02/ htmhttp://rucool.marine.rutgers.edu/deepwater/ http://www.webbresearch.com/slocumglider.aspx
Solarnavigator is a battery electric ASV (Autonomous Solar Vessel), a trimaran with an extremely efficient active hull that runs on solar power = energy from nature. This hull form has never been attempted before, nor has the use of wind energy been used in such manner for crew comfort (or complete onboard autonomy). A fleet of such vessels could be the basis of an international peacekeeping, and/or emergency rescue force.
Galley | Paints | Screens | Diving Project Estimates | Record Attempt | PR Events Batteries | Alloys | Timber | Composites | Navigation | Hydraulics Motors | Electronics | Solar Panels | Propeller | Transmission | Tooling | Life Support Tank Testing (Model Construction) & Results
The design of the Solar Navigator boat has been licensed for use in the John Storm series of books by Jameson Hunter
|
|
|
This website is copyright © 1991- 2012 Electrick Publications. All rights reserved. The bird logo and names Solar Navigator and Blueplanet Ecostar are trademarks ™. The Blueplanet vehicle configuration is registered ®. All other trademarks hereby acknowledged and please note that this project should not be confused with the Australian: 'World Solar Challenge'™which is a superb road vehicle endurance race from Darwin to Adelaide. Max Energy Limited is an educational charity working hard to promote world peace. |
|
|
AUTOMOTIVE | BLUEPLANET BE3 | ELECTRIC CARS | ELECTRIC CYCLES | SOLAR CARS | SOLARNAVIGATOR |