|
ROBOTS & AUTOMATION
|
||||
|
ROBOTIC CARS - In June 2021 the autonomous vehicle (AV) company Cruise LLC, majority-owned by General Motors Co (GM.N), urged US President Joe Biden to back efforts to speed thousands of self-driving cars to U.S. roads, saying the country risks lagging behind China. The chief executive of Cruise, Dan Ammann, in a letter to Biden dated May 17, asked him to back legislation raising the cap on the number of vehicles that a company can seek to have exempted from safety standards that do not meet existing federal requirements that assume human drivers are in control."
http://www.dpaonthenet.net building-touch-sensitivity-into-human-interactive-robots
AUTOMATION
Whilst many European companies have identified the benefits that automation can bring it seems in the
UK that companies are struggling to move away from the “make do and mend” attitude. The continued stifling of technological progression within manufacturing will hamper British efforts to compete internationally.
WHAT IS THE DEFINITION OF AUTOMATION?
http://www.themanufacturer.com/eventsite/automate-uk/
THE ETHICAL DILEMMA
As robots become more autonomous, the notion of computer-controlled machines facing
ethical decisions is moving out of the realm of science fiction and into the real world. Society needs to find ways to ensure that they are better equipped to make moral judgments than
HAL was.
Campaign groups such as the International Committee for Robot Arms Control have been formed in opposition to the growing use of drones. But autonomous robots could do much more good than harm. Robot soldiers would not commit rape, burn down a village in anger or become erratic decision-makers amid the stress of combat.
Driverless cars are very likely to be safer than ordinary vehicles, as autopilots have made planes safer. Sebastian Thrun, a pioneer in the field, reckons driverless cars could save 1m lives a year. For sure captainless ships would be far safer. Or at least ships with captains simply watching over the robot autopilot.
http://funkensprungnuts.wordpress.com/2012/06/01/robot-ethics-morals-and-the-machine/
FOREWORD:
Robots are working all over the world almost every day to make the lives of humans easier. Since the advent of microprocessors and computers, the possibilities for Robots to improve our civilisation are that much more.
We already have robot factories churning out cars to a higher standard, than those produced in manned factories. Simple domestic robots are finding their way onto the market to relieve us of tedious tasks. This is sure to mean more complex robots will be designed and become cheaper, to in turn, free humans more and more from everyday chores. Put this emerging technology together with renewable energy, such as solar cells, and the possibilities are endless. Not only could the world rely on plentiful renewable energy, but we'd have more time to devote to other problem areas in our society. We could build a higher society where food, energy, healthcare and transport are available to all.
Accordingly, we should encourage our children to become the engineers of tomorrow, to build on current state of the art, to produce practical robotic solutions for our future.
"ROBOTS ARE A VALUABLE RESOURCE IN THE MAKING" Quote: Design engineer January 2005
WHAT IS A ROBOT:
In practical terms, a robot is a mechanical device which performs automated tasks, either according to direct human supervision, a pre-defined program or, a set of general guidelines, using artificial intelligence techniques. These tasks either replace or enhance human work, such as in manufacturing, construction or manipulation of heavy or hazardous materials.
Overview
A robot may include a feedback-driven connection between sense and action, not under direct human control. The action may take the form of electro-magnetic motors or actuators (also called effectors) that move an arm, open and close grips, or propel the robot. The step by step control and feedback is provided by a computer program run on either an external or embedded computer or a microcontroller. By this definition, a robot may include nearly all automated devices.
Joints connect parts of manipulators. The most common joint types are:
A parallel robot is one whose arms (primary axes) have three concurrent prismatic joints or both prismatic and rotary joints. Degrees Of Freedom (DOF) means axes of movement. The human arm has 6 DOF. A 6 DOF is highly flexible.
Proprioceptive sensors sense the robot's actuators (e.g., shaft encoders, joint angle sensors). Proprioception is one of the most important senses of the human body.
Alternately, robot has been used as the general term for a mechanical man, or an automaton resembling an animal, either real or imaginary. It has come to be applied to many machines which directly replace a human or animal in work or play. In this way, a robot can be seen as a form of biomimicry. Lack of anthropomorphism is perhaps what makes us reluctant to refer to the highly complex modern washer-dryer as a robot. However, in modern understanding, the term implies a degree of autonomy that would exclude many automatic machine tools from being called robots. It is the search for ever more highly autonomous robots which is the major focus of robotics research and which drives much work in artificial intelligence.
Though we tend to think of robots as tremendously sophisticated, thanks typically to their anthropomorphic physical design and our excess of indoctrination to the robots of 1960s television, the fundamental elements are very simple. Motion is achieved by motors controlled by digital circuits that incorporate a key power semiconductor switching element called a thyristor or silicon-controlled rectifier (SCR).
The robot turns when only one of two parallel motors is actuated: for example, stopping the left motor while running the right motor causes the dummy to turn left. Digital signals fed to the motor control circuitry determine which motors move at which times. The problem can range from very simple (e.g., turning left or right) to very complex (e.g., controlling an elbow and wrist to move an item from a conveyor belt to a shelf). The signals can be sent by an outside element (e.g., a human operator) or by internal circuitry that makes "decisions" based upon observations of the robot's environment and may alter these decisions based upon whether the motion is proceeding satisfactorily.
Underlying simplicities notwithstanding, combinations of various computer systems and electromechanical subsystems can produce the appearance of profound sophistication, e.g., a "chess-playing robot" that really should be viewed as two discrete systems:
(1) chess-playing software that has nothing to do with robotics; and
(2) a robot that interacts with the chess board. The latter requires the abilities to:
[a] locate a chessman on the board based upon its expected coordinates, [b] lift the man, [c] remove any captured man from the board, and [d] reposition the first man--all without breaking or knocking down chess pieces or committing other environmental faux pas.
History
The idea of artificial people dates at least as far back as the ancient legend of Cadmus, who sowed dragon teeth that turned into soldiers; and the myth of Pygmalion, whose statue of Galatea came to life. In classical mythology, the deformed god of metalwork (Vulcan or Hephaestus) created mechanical servants, ranging from intelligent, golden handmaidens to more utilitarian three-legged tables that could move about under their own power. Jewish legend tells of the Golem, an clay statue animated by Kabbalistic magic. Similarily, in the Younger Edda, Norse mythology tells of a clay giant, Mökkurkálfi or Mistcalf, constructed to aid the troll Hrungnir in a duel with Thor, the God of Thunder.
The first recorded design of a humanoid robot was made by Leonardo da Vinci around the 1495. Da Vinci's notebooks, rediscovered in the 1950s, contained detailed drawings for a mechanical knight that was apparently able to sit up, wave its arms, and move its head and jaw. The design was likely based on his anatomical research recorded in the Vitruvian Man. It is not known whether or not he attempted to build the robot (see: Leonardo's robot).
The first known functioning robot was created in the 1738 by Jacques de Vaucanson, who made an android that played the flute, as well as a mechanical duck that reportedly ate and defecated. E.T.A. Hoffmann's 1817 short story "The Sandman" features a doll-like mechanical woman, and Edward S. Ellis' 1865 "Steam Man of the Prairies" expresses the American fascination with industrialization. A wave of stories about humanoid automatons culminated with the "Electric Man" by Luis Senarens in 1885.
Once technology advanced to the point where people foresaw mechanical creatures as more than toys, literary responses to the concept of robots reflected fears that humans would be replaced by their own creations. Frankenstein (1818), sometimes called the first science fiction novel, has become synonymous with this theme. When Capek's play RUR introduced the concept of an assembly line run by robots who try to build still more robots, the theme took on economic and philosophical overtones, further disseminated by the classic movie Metropolis (1927), and the popular Blade Runner (1982) and The Terminator (1984). With robots a reality and intelligent robots a likely prospect, a better understanding of interactions between robots and human is embodied in such modern films as Spielberg's A.I. (movie) (2001) and Proyas' I, Robot (2004).
Many consider the first robot in the modern sense to be a teleoperated boat, similar to a modern ROV, devised by Nikola Tesla and demonstrated at an 1898 exhibition in Madison Square Garden. Based on his patent 613,809 for "teleautomation", Tesla hoped to develop the "wireless torpedo" into an automated weapon system for the US Navy.
The first electronic autonomous robots were created by Grey Walter at Bristol University, England in 1948.
Literary history
The word robot comes from the Czech robota meaning "labor." The word was first used in Karel Capek's play R.U.R. (Rossum's Universal Robots) (written in 1920; first performed 1921; performed in New York 1922; English edition published 1923).
While Karel is frequently acknowledged as the originator of the word, he wrote a short letter in reference to the Oxford English Dictionary etymology in which he named his brother, painter and writer Josef Capek as its true inventor.
Some claim that the word "robot" was first used in Josef Capek's short story Opilec (the Drunkard) published in the collection Lelio in 1917. According to the Capek brother's Society in Prague, this is not correct. The word used in Opilec is "automat." "Robot" appeared in RUR for the first time.
Although Capek's robots were organic artificial humans, the word robot has come to refer to mechanical humans. The term android can mean either one of these, while a cyborg ("cybernetic organism" or "bionic man") would be a creature that is a combination of organic and mechanical parts. The word "robotics" was first used (in print) in Isaac Asimov's story Runaround (1942). In it, he referred to the 'three rules of robotics' that later became the Three Laws of Robotics.
Contemporary uses of robots
Robots are being used today to do the tasks that are either too dirty, dangerous, difficult, repetitive or dull for humans. This usually takes the form of industrial robots used in manufacturing lines. Other applications include toxic waste cleanup, space exploration, mining, search and rescue, and mine finding. Manufacturing remains the primary market where robots are utilized. In particular, articulated robots, similar in motion capability to the human arm, are the most widely used. Applications include welding, painting and machine loading.
The automotive industry has taken full advantage of this new technology where robots have been programmed to replace human labor in many simple repetitive tasks. The wide adoption of such technologies, however, was delayed by the availability of cheap labour and high capital requirements of robotics. Robotic AGVs (Automated Guided Vehicles) and other autonomous delivery robots are beginning to be used in the industry, hospitals, laboratories, server facilities and other applications where risk, reliability and security are important concerns. Likewise, autonomously patrolling safety and security robots are appearing as part of the growing move toward automated buildings.
While robotic technology has achieved a certain amount of maturity, the social impact of these robots is largely unknown. The field of social robots is now emerging and investigates the relationship between robots and humans. A ludobot is an instance of a social robot dedicated to entertainment and companionship.
In early 2000s domestic robots have entered the mainstream culture, with the success of Sony's Aibo and several manufacturers releasing robotic vacuum cleaners. The most popular category of home robots is the robotic vacuum cleaners, with 570,000 units sold worldwide by the end of 2003. Japanese corporations are notorious for their successes in developing humanoid robots and their plans to use the technology not only in their manufacturing plants, but also in Japanese homes. There is much hope in Japan, that home care for an aging (and long-lived) population can be better achieved through robotics.
Robots have also been explored as a form of High-tech Art. The Austin Robot group and others have produced many interesting pieces such as Sparky.
Current developments
When roboticists first attempted to mimic human and animal gaits, they discovered that it was incredibly difficult; requiring more computational power than what was available at the time. So, emphasis was shifted to other areas of research. Simple wheeled robots were used to conduct experiments in behavior, navigation, and path planning. These navigation techniques have now developed into commercially available autonomous robot control systems; the most sophisticated examples of autonomous navigation control systems now available include the commercial/industrial ARCS laser-based navigation system from ActivMedia/MobileRobots and the home/consumer-oriented VSLAM-based NorthStar system.
When engineers were ready to attempt walking robots again, they started small with hexapods and other multi-legged platforms. These robots mimicked insects and arthropods in both form and function. The trend towards these body types offer immense flexibility and proven adaptability to any environment. With more than four legs, these robots are statically stable which makes them easier to work with. Even though significant progress towards bipedal locomotion in robots has been made only recently, in just 4 years after the introduction of Asimo bipedal robots such as KHR-1 that cost only $1300 became available.
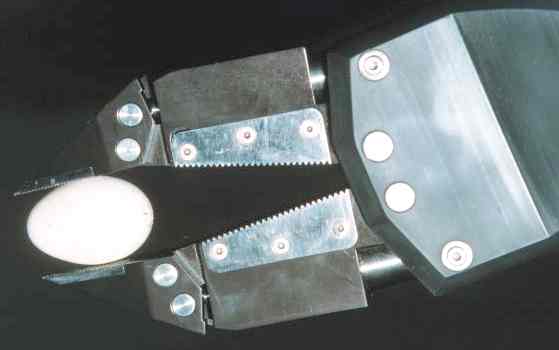
Robot hand holding an egg
Another technical problem preventing wider adoption of robots is the complexity of handling physical objects in the inherently chaotic natural environment. Tactile sensors and better vision algorithms may solve this problem. Librarian robot from University Jaume I in Spain is a good example of current progress in this field.
Recently, tremendous progress has been made in medical robotics, with two companies in particular, Computer Motion and Intuitive Surgical, receiving regulatory approval in North America, Europe and Asia for their robots to be used in minimal invasive surgical procedures. Laboratory automation is also a growing area. Here, benchtop robots are used to transport biological or chemical samples between instruments such as incubators, liquid handlers and readers. Other places where robots are likely to replace human labour are in deep-sea exploration and space exploration. For these tasks, arthropod body types are generally preferred. Mark W. Tilden formerly of Los Alamos National Laboratories specializes in cheap robots with bent but unjointed legs, while others seek to replicate the full jointed motion of crabs' legs.
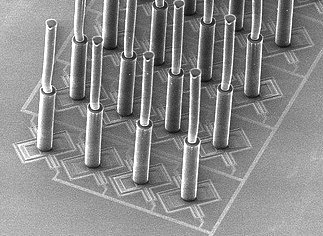
Experimental winged robots and other examples exploiting biomimicry are also in early development. So-called "nanomotors" and "smart wires" are expected to drastically simplify motive power, while in-flight stabilization seems likely to be improved by extremely small gyroscopes. A significant driver of this work is military research into spy technologies.
Future prospects
Some scientists believe that robots will be able to approximate human-like intelligence in the first half of the 21st century. Even before such theoretical intelligence levels are obtained, it is speculated that robots may begin to replace humans in many labor-intensive career fields. The cybernetics pioneer Norbert Wiener discussed some of these issues in his book The human use of human beings (1950), in which he speculated that robots taking over human jobs may initially lead to growing unemployment and social turmoil, but that in the medium-term it might bring increased material wealth to people in most nations.
Robotics will probably continue its spread in offices and homes, replacing "dumb" appliances with smart robotic equivalents. Domestic robots capable of performing many household tasks, described in science fiction stories and coveted by the public in the 1960s, are likely to be eventually perfected.
There is likely to be some degree of convergence between humans and robots. Many humans are already cyborgs with some body parts and even parts of the nervous system replaced by artificial analogues. In many cases the same technology might be used both in robotics and in medicine.
Competitions
Dean Kamen, Founder of FIRST, and the American Society of Mechanical Engineers (ASME) created a competitive forum that inspires in young people, their schools and communities an appreciation of science and technology.
Their Robotics Competition is a multinational competition that teams professionals and young people to solve an engineering design problem in an intense and competitive way. In 2003 the competition will reach more than 20,000 students on over 800 teams in 24 competitions. Teams come from Canada, Brazil, the U.K., and almost every U.S. state. Unlike the Robot sumo wrestling competitions that take place regularly in some venues, or the Battlebots competitions on TV, these competitions include the creation of the robot.
RoboCup is a competitive organization dedicated to developing a team of fully autonomous humanoid robots that can win against the human world soccer champion team by the year 2050. There are many different leagues from simulation, to full-size humanoid. The DARPA Grand Challenge was a competition for robotic vehicles to complete an under-300 mile, off-road course in the Mojave Desert.
The two AAAI Grand Challenges focus on Human Robot Interaction, with one being a robot attending and delivering a conference talk, the other being operator-interaction challenges in rescue robotics. The Centennial Challenges are NASA prize contests for non-government funded technological achievements, including robotics, by US citizens.
The popularity of the TV shows Robot Wars and Battlebots, of college level robot-sumo wrestling competitions, the success of "smart bombs" and UCAVs in armed conflicts, grass-eating "gastrobots" in Florida, and the creation of a slug-eating robot in England, suggest that the fear of an artificial life form doing harm, or competing with natural wild life, is not an illusion. The worldwide Green Parties in 2002 were asking for public input on extending their existing policies against such competition, as part of more general biosafety and biosecurity concerns. It appears that, like Aldous Huxley's concerns about human cloning, questions Karel Capek raised eighty years earlier in science fiction have become real debates.
Possible dangers
The concern that robots might displace or compete with humans is common. In his I, Robot series, Isaac Asimov created the Three Laws of Robotics in a literary attempt to control the competition of robots with humans:
Unfortunately the issue may be not so simple to resolve. Asimov himself based the plots of quite a few robots novels on probing into the applicability and sufficiency of the Three Laws. The laws or rules that could or must apply to robots or other "autonomous capital" in cooperation or competition with humans have spurred investigation of macro-economics of this competition, notably by Alessandro Acquisti building on much older work by John von Neumann.
Even without overt malicious programming, robots and humans simply do not have the same body tolerances or awarenesses, leading to accidents: In Jackson, Michigan on July 21, 1984, a factory robot crushed a worker against a safety bar in apparently the first robot-related death in the United States.
Class of robots
Subresearch field within robotic
LINKS:
Research field which use robots or are linked to robotic
Events related to robotic
Additional robot topics
Prototype frame for a giant robot insect ant to be used in special effects for a film version of 'Sectasaur' the adventure story by Jameson Hunter. IP rights acquired by Blueplanet Universal Holdings Ltd, February 2013.
Animatronic artwork for a giant robot insect ant to be used in special effects for a film version of 'Sectasaur' the adventure story by Jameson Hunter. IP rights acquired by Blueplanet Universal Holdings Ltd, December 2015.
Famous roboticists
MORE LINKS:Media coverage and articles
General information and non-profit organizations
Commercial projects
The robots exclusion standard or robots.txt protocol is a convention to prevent well-behaved web spiders and other web robots from accessing all or part of a website. The information specifying the parts that should not be accessed is specified in a file called robots.txt in the top-level directory of the website.
The robots.txt protocol is purely advisory, and relies on the cooperation of the web robot, so that marking an area of your site out of bounds with robots.txt does not guarantee privacy. Many web site administrators have been caught out trying to use the robots file to make private parts of a website invisible to the rest of the world. However the file is necessarily publicly available and is easily checked by anyone with a web browser.
The robots.txt patterns are matched by simple substring comparisons, so care should be taken to make sure that patterns matching directories have the final '/' character appended: otherwise all files with names starting with that substring will match, rather than just those in the directory intended.
There is also a convention for HTML meta tags that may be used to exclude robots according to the contents of web pages. Again, this is purely advisory, and also relies on the cooperation of the robot programs. For example, the HTML code for this page includes the line
Since
it was founded in 1799, the Royal Institution has worked
to make science more widely understood and appreciated
by the general public. Its laboratories have also been
home to many of the world's scientific pioneers and
their discoveries. They include Michael Faraday who,
among other things, invented the first electric motor,
dynamo and transformer; Sir Humphrey Davy who discovered
sodium, potassium, barium, calcium and magnesium; and
Sirs William and Lawrence Bragg who pioneered the use of
X-rays to investigate the structure of crystals.
TV Who's Professor Kevin Warwick?
In
1998 Kevin shocked the international scientific
community by having a silicon chip transponder
surgically implanted in his left arm. A series of
further implant experiments is now planned in which
Kevin's nervous system will be linked to a computer.
TV
LECTURE 2 - HYPER SENSES
TV
LECTURE 3 - REMOTE ROBOTS
What are cyborgs and what would they look like? Would they resemble Arnold Schwarzenegger in The Terminator or might they be more like The Borg from Star Trek? Are they just science fiction or are they already here?
Some
of the answers in BIONIC BODIES might surprise you -
cyborgs are not just possible, but a reality! After all,
many humans are already being fitted with machines which
help them to live normal lives, things like replacement
limbs, heart pacemakers, cochlea implants for the deaf,
even an electronic 'eye' for blind people. These men and
women are technically, cyborgs! But what of the rest of
us? Would you want to be a cyborg of the future? Well
you may well have the chance! Microchips are being
developed which can deliver medicine in precise amounts,
they can be put onto clothes or jewellery as wearable
computers. We don't want to reveal too many secrets, but
did you know that Professor Kevin Warwick was once a
cyborg himself?
Find out about the 2000 Royal Institution Christmas Lectures - Rise of the Robots!. They were given by former cyborg Professor Kevin Warwick, Head of the Department of Cybernetics at Reading University.
Robot Construction Robot News Science and Technologies Give your robot a head start by checking the science and technology right here. Much of the information relates to the Physics, Design & Technology and Biology schools curriculum for 11 - 16 year olds.
A new Wired article discusses the problem Hollywood seems to have with robots and technology in general. They seem to make a large number of movies in which technology in general and robots in particular are evil. Artist Fernando Orellana, among others, thinks Hollywood is wrong. Orellana has created a kinetic art piece called Unending Enclosure for the Art & Artificial Life International Competition that offers an alternate view of three robots that are frightened of humans.
IBM has posted a new developerWorks article on wireless robotics. The article explains some of the uses of wireless robotics - either human control of non-autonomous robots or for inter-robot communication between cooperative autonomous robots. It further breaks cooperative robots in marsupial teams where there is a mother-child relationship and competitive teams such as RoboCup soccer robots. A list of pitfalls that may be encountered when using WiFi for wireless robotics is also provided.
http://www.robotee.com/index.php/types-of-robots/
LAND BASED ROBOTS
BIPEDS | CYBEE | HEXAPODS | HUMANOID | MANTIS | OCTOPODS QUADRUPEDS | ROBOBEE | ROBOT ANT | SPIDERBOT | STOMPY | TRIPODS
14 in 1 SOLAR ROBOT KIT - A solar powered robot kit for ages 10+
BIROB CHEETAH EPFL - Claimed to be the fastest quadruped robot cat @ June 2013
WATERBORNE (MARINE) ROBOTS
Bluefish - Bluebird Marine's autonomous boat development program
CMTI - Centre for Maritime Technology and Innovation - Autonomous Study
FishPi - An autonomous boat project to prove the capability of the Raspberry computer to navigate a vessel for long distances.
INDAGATUS - Small endurance UMV platform
Microtransat - Competition for autonomous sailing models
MIT Cambridge University - Controlling Drone with Mobile Phone
MONALISA - Motorways of the Sea, eco-efficient e-navigation solutions contribution to safe maritime transport
MUNIN - Maritime Unmanned Navigation through Intelligence in Networks & E-Nav International 7th Framework
OpenROV - Open source underwater robots for exploration and education.
Roboboats - Autonomous Surface Boats competition, ASVs
Robosubs - Autonomous Underwater Vessel competition AUVs
SeaNet - Robotic ocean military peacekeeping patrols
Scout Transatlantic - autonomous robot Atlantic crossing project
Sea Robotics - Unmanned systems
Slocum sea glider - Doug Webb & Henry Stommel
Snoopy Sloop - Robin Lovelock's robot sailing boat: Microtransat Trans-Atlantic competition
USNA - Roboboat competition team 2011 & 2012
University Western Australia - USAL robot sub
Woods Hole Oceanographic Institution - ABE lost at sea
.
SECTASAURUS
- New for 2016, Jameson
Hunter is now developing the giant (bulldog) ant
based special effects animatronic for this potential cult sc-fi story.
Bluebird Marine Systems have been asked to look at re-making the
mechanics that went missing many years ago. The object is to produce a
few publicity articles and maybe give some aspiring film producers a
chance to make a pilot, possibly with the help of crowd funding.
|
||||
|
This website is copyright © 1991- 2023 Electrick Publications. All rights reserved. The bird logos and names Blueplanet Ecostar and Blue Max are trademarks ™. The Blueplanet vehicle configuration is registered ®. The name Solar Navigator is a registered trademark and the boat design is copyright, All other trademarks hereby acknowledged. Max Energy Limited is an educational charity.
|