|
SPIDERBOT
|
|
|
|
SPIDERBOT
HEXAPOD?
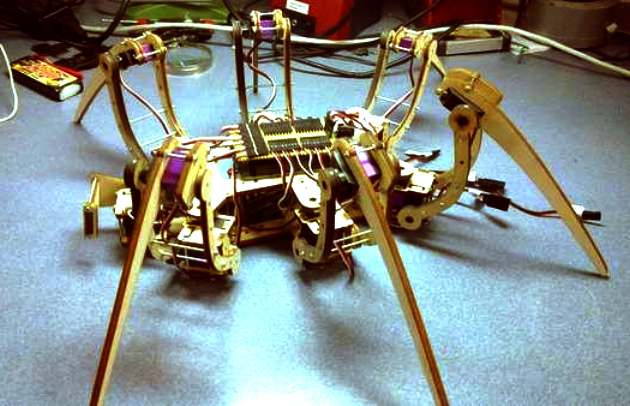
The servos on the youtube video below are a bit jumpy, as Daniel explains. He used a lipo battery running @ 7.4V which should be regulated to 6V. But the lipo is 8.4V when fully charged - so you get about 7V after voltage down-regulation. (which is 1V above the max voltage that should uses). He used one arduino-mega to calculate everything (@ ~15 "fps") and to drive all 20 servos (so the signal might not be the nicest quality). The servos used are cheap (but strong).
ABOUT DANIEL
Daniel Schatzmayr is a passionate software developer from Austria working for a Games Company in Vienna.His interest lies within hacking robots and robotic technologies. Daniel started programming at the age of seven on a C64. Since then he is fascinated by computers, software, electronics and the possibilities coming with these technologies. As a member of the Viennese hackerspace METALAB Daniel approves the basic idea of technology-based creativity in this social space and benefits from and contributes to the open source concepts of this group.
He is working on different robot projects and is currently developing a Cocktail robot for Roboexotica in Vienna.
SYMPOSIUM
TECHNOSENSUAL EXHIBITION 10-09-2012 THANKS TO: Daniel Schatzmayr, Franziska Praendl, Theresa Wilson, Anouk Wipprecht, Simone Feichtinger, Martin Lenz, Philipp Tiefenbacher, Geoffrey Lillemon / Oculart, Markus Piller, Horia Botezan, Renato Panic, Angelika Lux, Carrie, Ina Holub, Metalab, Alfa Zeta
LINKS
Metalab Vienna. Hackerspace: http://metalab.at/ http://www.paulinevandongen.nl/eng/2012/end-symposium-technosensual-exhibition/ Thingiverse: http://www.thingiverse.com/thing:1603 Roboexotica. Festival for Cocktail Robotic: http://www.roboexotica.org/ Ars Electronica Festival: http://www.aec.at/festival_about_en.php http://discovermagazine.com/2013/may/14-bug-inspired-robots-designed-to-do-our-dirty-work#.UYbGq6KsiSp http://robobees.seas.harvard.edu/ https://twitter.com/__mind__ https://www.facebook.com/daniel.schatzmayr
OTHER HEXAPOD ROBOT PROJECTS
This subject has received a lot of attention from other engineers:-
A-Pod is an ant inspired hexapod robot with a 2 DOF abdomen (tail), a 3 DOF head with large mandibles. 6 legs with 3 DOF each. Total 25 servos. This video demonstrates body movement and mandible control.
The designer still has to make some mechanical improvements to the legs
(explaining the small amount of walking). The robot is remotely controlled with a custom 2,4 GHz RC transmitter. The Basic Atom Pro 28
is/are used as the main micro-controller(s).
FireAnt is based on Zenta's A-POD and made from all aluminum anodized brackets. The kit includes the new digital HV220 robotic servos with position and force feedback. This gives FireAnt life like movement and the ability to sense its environment. It can sense the force the pincher's are applying with no additional sensors. It can also feel when a leg is touching something in both down and forward directions for autonomous terrain adaptation.
http://www.orionrobotics.com/FireAnt-Hexapod-Robot_p_248.html
http://regator.com/p/230211129/diy_spiderbot_is_a_freak_robot/ http://www.sussex.ac.uk/profiles/dr_paul_graham http://www.bbc.co.uk/news/ants http://fallout.wikia.com/wiki/File:Giant_ant http://killallmonsters.com/ants http://themediumandthemayhem.net/2011/08/26/ferroluar/ http://fallout.wikia.com/wiki/Giant_ant http://projecthexapod.com/blog/ http://www.kickstarter.com/projects/projecthexapod/stompy-the-giant-rideable-walking-robot https://www.facebook.com/ProjectHexapod http://www.wired.co.uk/news/archive/2012-10/03/robot-bee-brains http://geekbeat.tv/stompy-a-helpful-giant-robot-hexapod/
A project with bite. These robot jaws (when made of steel) shut with a pressure of up to 2 tons and in less than a quarter of a second.
Lurking beneath the Antarctic ice is a discovery that scientist will die for.
BIPEDS | CYBEE | HEXAPODS | MANTIS | OCTOPODS QUADRUPEDS | ROBOBEE | ROBOT ANT | SPIDERBOT | STOMPY | TRIPODS
....... The World in Your Hands
|
||
|
This website is copyright © 1991- 2023 Electrick Publications. All rights reserved. The bird logo and names Solar Navigator and Blueplanet Ecostar are trademarks ™. The Blueplanet vehicle configuration is registered ®. All other trademarks hereby acknowledged and please note that this project should not be confused with the Australian: 'World Solar Challenge'™which is a superb road vehicle endurance race from Darwin to Adelaide. Max Energy Limited is an educational charity working hard to promote world peace.
|
||




{kind=link}