|

MONALISA
MARINE NAVIGATION SYSTEM
Mona
Lisa is not just the name of the most famous painting in the world by Leonardo
da Vinci. It is also the name of an autonomous navigation system that could
prevent most accidents at sea.
MonaLisa
is a sort of
' Motorways of the Sea' project which aims to make a contribution to safe and environmentally friendly
(efficient) maritime
transport of the future. The project partners hope this can be done through demonstration and dissemination of
their innovative e-navigational services to the shipping industry, which
could lay the groundwork for future international deployment.
A concept paper of Dynamic & Proactive Route planning was completed
by November 2011.
The project is sufficiently advanced that focus has now been transferred from development of
the concept (design and system development) to testing and validation of the concept.
The first simulated transmission between ship and shore with route-updating procedure
was performed successfully in early January 2012. Draft operational procedure plans
have been drawn up.
The first tests of the concept on board the
Swedish working vessel Fyrbyggaren
are to be carried out at the end of 2012. The first tests onboard commercial vessels are
set to start in Spring 2013.
A study is now underway as to how to integrate port information in the MONALISA concept. This
is a critical issue.
Comprehensive studies on the regulatory framework, especially IMO regulations and
UNCLOS, as well as a socio-economic analysis, are ongoing.
A legal
and socio-economic studies will be presented in 2013.
Cooperation has been established with the World Wildlife
Foundation (WWF). The WWF has commissioned a study of the environmental impact
that dynamic & proactive route planning could have in marine conservation
terms.
The test bed of MONALISA is to cover the Mediterranean (Baltic) Sea. The
SolarNavigator
project is a world autonomous
circumnavigation, which could take the project to another level if cooperation
is possible, which seems to be what the MonaLisa project is all about.
The basic concept on Global Sharing of Maritime Information was presented at the IALA workshop in September
2011, to be expanded in 2013.
MONA LISA 2
MonaLisa 2 is a new project initiative on Sea Traffic Management with
increased focus on the safe navigation of large passenger vessels; after
the Costa
Concordia and Baltic
Ace accidents in January and December 2012.
Activity 1 – Extended test-bed for Dynamic & Proactive Routeplanning
Extended test-bed for MONALISA Dynamic and Proactive Routeplanning (Sea Traffic Management). The activity encompasses both deployment
and operation tests of a Sea Traffic Control Centre (STCC) in cooperation with shipping companies.
Activity 2 – Information management; a study on development of the SESAR concept for the Maritime Sector (LEONARDO).
The Leonardo concept implemented in the maritime sector is the paradigm shift of information management by introduction of
'Voyage based operations' instead of 'Surface based operations', as is the practice in the maritime world of today. With a combination of the SWIM Process (System Wide Information Management) and Voyage based operations, the maritime sector is anticipated to solve the obstacles to obtain a complete chain of
information.
Activity 3 – Human Factors: Certificates, Routeplanning, Bridge procedures, responsibilities and education
Activity 4 - Safer Ships & SAR
Activity 5 – Large Passenger Ships in Ports, aims at improving the ability of
port authorities to handle risks connected with these large vessels.
Time schedule - MONALISA 2.0 is estimated to be implemented between 2012-2014.

PARTNERSHIPS MONALISA 1
The
Danish
Maritime Authority has responsibility for the construction, equipment and operation of
Danish ships
including safety, navigational regulations, ship registration, shipping policy, maritime law as well as industrial policy, both nationally and
internationally. The DMA is a government agency part of the Ministry of Business.
The
Finnish Transport
Agency The Finnish Transport Agency is responsible for the traffic management on roads, waterways and railways.
The Finnish Transport Agency’s Hydrographic Office publishes printed and electronic charts of Finland’s coastal and lake areas and manages the ongoing chart update service.
GateHouse is
specialises in the development of technical software and system integration for advanced satellite communications and tracking systems.
They are a leading independent provider of complete embedded software for Inmarsat BGAN terminals
SAAB
serves the global market:
governments (navy), coastguards and corporations with products, services and solutions from military defence to civil
navigation via LPI pulsed radar, sonar and other transponders.
SSPA provide effective marine transport solutions for the maritime field – ship design, maritime operations, port development
and coastal services. Seventy percent of the earth’s surface is water,
with 90 percent of cargo transported by ships. SSPA is aware that the maritime industry has tremendous impact on our environment.
The Swedish
Maritime Administration (SMA) offers modern and safe shipping routes with 24 hour service.
SMA is a governmental agency and enterprise within the transport sector and is responsible for maritime safety
and the future of shipping, primarily merchant shipping, but also pleasure boating and fishing.
Services include: Port Pilots and Marine Traffic Information
The University
of Chalmers is a highly progressive, situated in Gothenburg, Sweden.
They are known globally for education, research and innovation.
EfficienSea
is concerned with the development of safe sustainable traffic at sea - in
particular the e-Navigation: "the harmonized creation, collection, integration, exchange and presentation of maritime information on board and ashore by electronic means to enhance berth-to-berth navigation and related services, for safety and security at sea and protection of the marine
environment." Ref: Committee of the International Association of Marine Aids to Navigation and Lighthouse Authorities,
IALA.


Magnus
Sundstrom - Project Leader
Jonas Vedsmand - Marketing Director
Modern technology on the vessel bridge provides a lot of information that is supposed to help the navigator. But part of the information is unorganized and the excess of information can lead to accidents.
E-Navigation a new standard for organizing the information, providing for better means of
navigation. One system integrates all the necessary information to give the right information at the right time, filtering out everything that is irrelevant for safe navigation.
PARTNERSHIPS MONALISA 2.0
- is/are under development. Maritime authorities, private sector partners as well as academic organizations are invited to join the project.
DESCRIPTION OF GLOBAL PROJECT
The main objective of the global project is to contribute to the promotion of the Motorways of the
Sea (MoS) concept in line with, the EU's Strategy for the Baltic Sea Region.
The global project will also contribute to develop and implement the EU´s e-maritime initiative.
Activity 1 - Dynamic & Proactive Route planning (DPR)
Activity one aims to develop and test a new model in route planning based on existing Electronic
Nautical Charts and Automatic Identification. Each vessel's pre-planned route will be
visible for other vessels and monitoring centres ashore. Radio communications between vessels will not be needed when preplanned routes clearly describe all navigators intended routes on screens onboard. Monitoring
centres and others will immediately see if a vessel is deviating from a pre-planned route and will be
able to take action. All vessel routes will be available for other ships for
anti-collision
purposes.

Activity 4 - Global Sharing of Maritime Information (GSMI) - The main goal of this activity is to enable sharing maritime data on a global scale based on the
experience gained from HELCOM AIS, SafetSeaNet and Stires systems.
Activity four will be implemented within ten sub-activities:
1. Preparation and process planning
Analyses of relevant findings and experience from other projects and transport modes. A detailed
description of the concept/methodology will be elaborated. This subactivity is to be completed in
November 2011 and delivered as a report. The report will be reviewed by external experts.
2. Routes
Elaboration of optimal routes for the vessels is a demanding task of the Activity. Required
transmission data will be assessed and suitable protocols and operative schedule including
interfaces will be determined. User requirements and technical requirements for onboard and
control centres will be prepared. Standards for different ship models and fairway details will be
elaborated together with criteria for calculation of best route and speed pattern for each individual
ship. Possible conflict processes will be assessed. Required capacity for hardware and software
onboard and ashore will be prepared. The specification to be used in software development is to be
delivered end of August 2011. Basic algorithms for construction of routes and voyage plans will be
elaborated, based on different relevant indata. The first tests of communication voyage plans will be
performed in simulators at Chalmers in November 2011. Iterative tests will continue during 2012.
3. Technical solutions
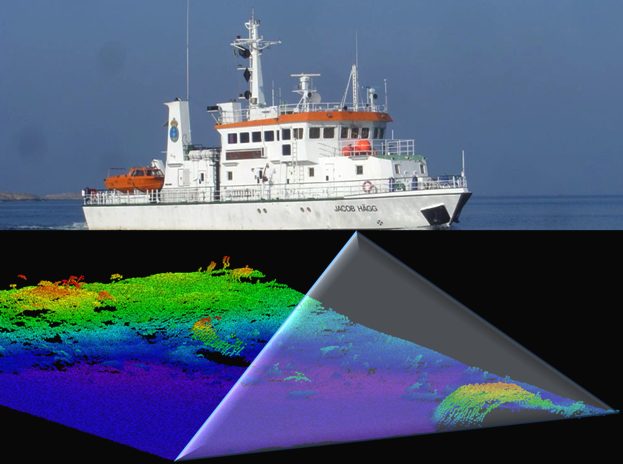
The best possible transmission systems will be tested and evaluated. Possibilities to obtain data
from established meteorological institutions will be investigated. Hydrographical information will
be gathered. Technical solution for presentation of other vessels routes onboard ships will be worked out. Introduction of new display to be used onboard vessels is to be delivered in December
2011. A definition of transmission systems will be presented by the end of April 2012. A Ship toship solution for transmission of routes between vessels is to be delivered in the end of May 2012.
4. Surveillance and security
Technique and process for detection of anomalities within route legs will be elaborated together
with assessment of security issues connected to system information. A first beta model will be
delivered in July 2012. Complete system is to be delivered in January 2013. Security systems is to
be delivered in July 2012.

5. Ports
Required information from different kind of ports for optimization of vessels voyages will be
assessed. Models for input data will be established in December 2012. First port (Gothenburg
engaged December 2012, followed by a second port (Aarhus) in January 2012 and a third port
(Stockholm) in April 2012.
6. Legal matters
Possible legal obstacles and liabilities in international legislation will be assessed together with
proposals for adjustments. Complete report delivered in June 2012, covering
liabilities and comparison with air traffic regulations and related legislation for the civil aviation.
7. Formal Safety Assessment
An analysis will be carried out to assess how the risk factor regarding safety is changed with
implementation of the system. A report with a Formal Safety Assessment is to be delivered end of
January 2013
8. Human factors
Man-technology-organisation studies will be performed. Officer’s opinion on the system functions
will be investigated. Workshops with end-users to be continuously performed. A report will be
submitted by the end of June 2013
9. Test and evaluation
Simulations of the operating system will be performed in a simulator. Sound VTS center and some
vessels will be utilized for a full scale test. First operational tests will be carried out in simulators at
Chalmers before the end of May 2012. First full scale tests onboard vessels will be carried out
during year 2013 and should be finalised before the end of October 2013.
10. Dissemination
A website for the activity will be created and an information movie about proactive route planning
produced. A project website will be up and running end of February 2011. At least 20 relevant
conferences, workshops or symposiums will be attended during the full project time, were the
MONALISA project will be presented. Website calendar will continuously be
updated to include a movie presenting the dynamics.
MONA
LISA CONTACTS
Magnus
Sundström
MONALISA Project Leader
Swedish
Maritime Administration
Market Department
Phone: +46 10 47 84 681
E-mail: magnus.sundstrom@sjofartsverket.se
http://www.sjofartsverket.se/en/MonaLisa/
MONALISA
PARTNER'S LINKS
Danish
Maritime Authority
Finnish
Traffic Agency
Gatehouse
Saab
SSPA
Swedish
Maritime Administration
University
of Chalmers
EfficienSea
Swedish
Traffic Agency - Info about Green Corridors
An
initiative from the European Commission
The
Mona Lisa with Professor Donald Sassoon
LINKS
http://www.scheepsbouw.nl/
- Dutch Shipbuilding Association
http://www.retrofit-project.eu/
- European Commission 7th Framework
initiative
http://www.cmt-net.org/
- Germany: Centre of Maritime Technologies
http://www.enav-international.com/issues/articles/id1317-Autonomous_Ships_in_Sight
http://www.unmanned-ship.org/munin/
The
ultimate Robot Boat. Solarnavigator uses an advanced SWASSH hull as the
platform
to
mount the world's first autonomous circumnavigation. A successful expedition
could pave the way for improved safety
at sea.
|