|
SMALL WATERPLANE AREA TRIPLE HULLS
|
||||||||
| HOME | BIOLOGY | BOOKS | FILMS | GEOGRAPHY | HISTORY | INDEX | INVESTORS | MUSIC | NEWS | SOLAR BOATS | SPORT | ||||||||
|
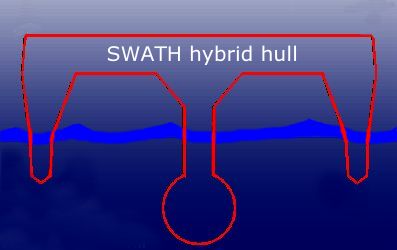
Here we re-define SWATH terminology, to an acronym of Small Waterplane Area Triple Hull, or Small Waterplane Area Single Stabilised Hull = SWASSH. Such vessels are in the experimental stages. We know of a serious design study, but cannot yet reveal the name of designer, location or builder. In essence you are looking at a Trimaran with a submerged centre hull for longitudinal ride stability, and outriggers for transverse stability.
SWASSH single centre hull with semi- submerged (trimaran) outriggers
It is a little known fact, that two of the early SWATH concept patents, those held by Blair (1930) and Lang (1971), included tri-hull small waterplane area configurations. It is also a fact that there has been considerably less development work on tri-hull geometries, and would you believe that to date (April 2006), no tri-hull, or SWASSH vessels have been built.
However, beginning in the 1980s more research and development had been carried out than is commonly known. It has been shown that a tri-hull small-waterplane-area design can provide substantially improved speed to power performance compared with a twin-hull SWATH vessel of equal displacement.
THEORETICAL ADVANTAGES TO SWASSH
Marine architects will know that less engine power is needed for tri-hull configurations at moderately high speeds (trimarans). This is mainly as a result of decreased wave-making resistance.
In order to achieve this in a SWASSH, it is important that the hull configuration should not incur a large frictional resistance penalty, from increased surface area. The total resistance of a twin-hull SWATH ship at moderately high speeds is roughly 50% frictional and 50% wave-making or form drag.
SWATH ships are usually much shorter than a monohull or conventional catamaran of equal displacement. This is partly to minimize the weight penalty caused by the more deeply submerged hulls that a SWATH vessel has. In addition, the smaller water-plane area makes it necessary to have wider hull spacing than used on conventional catamaran twin hulls, for the same stability.
A benefit is that shorter length minimizes the frictional resistance penalty from the submerged hulls, where otherwise the higher wetted area per foot of length, would detract from the overall design advantages. Another disadvantage to remember it that twin-hull SWATH configurations often have relatively high wave-making resistance, due to their short speed length ratio and also increased displacement as a result of the greater structural mass inherent in the design.
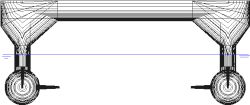
SWATH single centre hull with trimaran style outriggers = SWASH
An important factor affecting performance is the ratio of hull wetted area to displaced volume. For geosims* this ratio follows the scale 'square-cube law' - Wetted area is proportional to (scale ratio)2 - displaced volume is proportional to (scale ratio)3.
The wetted area of each hull of a SWATH is 0.794 x 0.794 = 0.63 x that of the monohull. The displaced volume for each hull is 0.50 x that of the monohull. It follows that the wetted area per ton of buoyant volume for the SWATH hull is (0.63/0.50) = 1.26 x that for a geometrically similar monohull. This means that SWATH ships have 26 percent higher total frictional resistance than a monohull small-waterplane-area ship of twice the displacement. A pure submerges triple hull (one with three equally sized submerged hulls) would have an ever higher total frictional resistance if we apply the square-cube law. A quad submerged hull would be even worse, etc.
For comparison purposes it is useful to think of the 2 hulls of a SWATH ship as geosims* of a single-hull small waterplane area ship having twice as much displaced volume, or buoyancy, i.e. the same volume in one round hull, as split into two round hulls.
Each dimension of a geosim, such as hull length, is related to the corresponding dimension of a single submerged reference hull by, the linear scale ratio, which is defined as the cube root of the ratio of their displacements. Thus, the length of each SWATH ship hull is (0.500)^0.333 = 0.794 x the length of a monohull small-waterplane-area ship of twice the displacement.
For a triple hull, the wetted area per ton would be 1.44 x that for the monohull with three times larger displacement. In such an example, total frictional resistance would rise to 144 percent that of the monohull and about 114.5% more than for a comparable conventional twin-hull SWATH ship.
However, if one uses a large centre submerged small waterplane hull to carry the loads of the vessel, for say 80-90% of the total displaced volume, then use two stabilizing outriggers, in trimaran layout as seen in the top diagram, the total frictional resistance disadvantage falls to 105% of a comparable conventional SWATH vessel. By contrast, the wave-making resistance falls dramatically, hence there is a substantial overall decrease in total resistance. Such a design was first announced by Wiliam O'Neil in 1986.
Typical submerged hull and strut sections
Such a design proposal is currently under investigation by the SolarNavigator team. Should tank test models confirm the theory, the technology will be incorporated in their World Navigation challenger as the worlds first SWASSH vessel.
*NOTE: Geometrically similar ship forms of different sizes are called GEOSIMS.
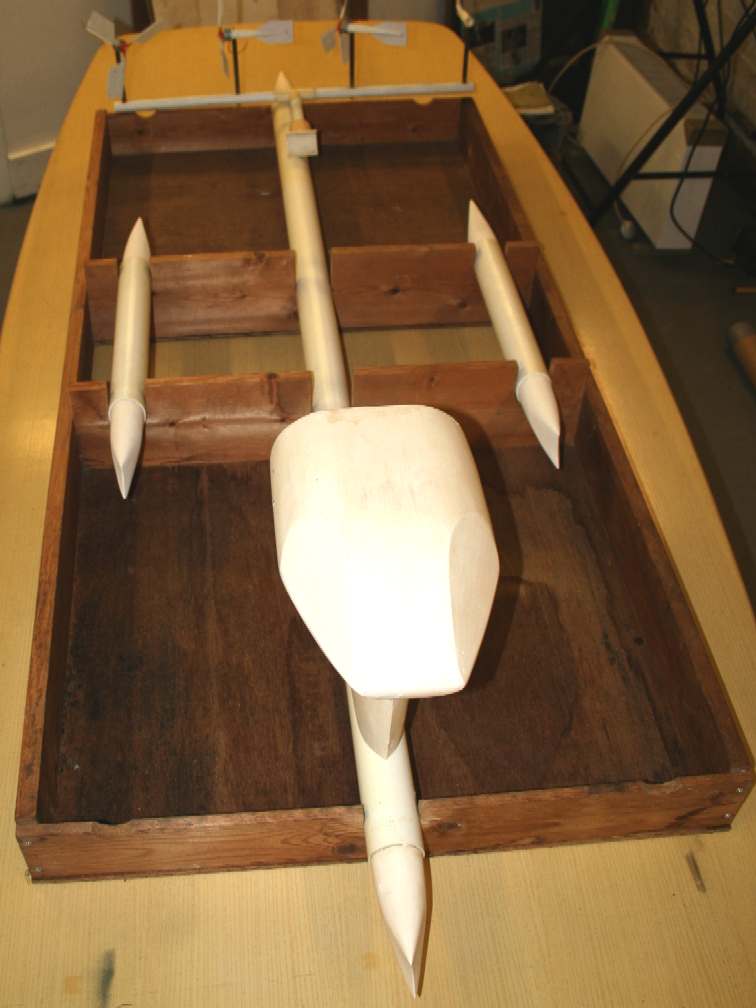
Early prototype SWASH hull - Project 'BLUEFISH' a robotic fully autonomous model
SWATH LINKS:
Home | About SIL | Products | Designs | FAQs | Contact What's New | Events | Swath Concept
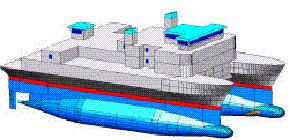
Conventional SWATH ship design
SWATH LINKS:
Home | About SIL | Products | Designs | FAQs | Contact What's New | Events | Swath Concept
A heartwarming story of pirates v conservationists
|
||||||||
|
This website is Copyright © 1999 & 2013 Max Energy Limited an educational charity working hard for world peace. The bird logos and names Solar Navigator, Blueplanet Ecostar and Utopia Tristar are trademarks. All rights reserved. All other trademarks are hereby acknowledged.
|
||||||||
|
AUTOMOTIVE | BLUEPLANET BE3 | ELECTRIC CARS | ELECTRIC CYCLES | SOLAR CARS | SOLARNAVIGATOR | UTOPIA |