|
HAWKEYE - AUTONOMOUS SENSORS
|
|||||||||||||||||||||||||||||||
|
6. THE EYES AND EARS - HAWKEYE
Cameras, Microphones, Proximity sensors, Laser range finders.
Typically concerning robot boats the environment is perceived through laser range finders, a radar system, a stereo camera pair, and a monocular vision system. The sensors acquire environment data at rates between 10 and 100 Hertz. Map and position information is incorporated at 10 Hz, enabling SolarNavigator to avoid collisions with obstacles when docking and other vessels in real-time while navigating the open oceans - but it doesn't stop there.
In addition to GPS, SolarNavigator uses a optical-based control system to take advantage of real-time vision to identify targets and avoid obstacles, for its autonomous navigation, rather than depending solely on pre-determined routes. As you may imagine, this is the tip of the iceberg, involving data manipulation and control, integrated with communication equipment of several kinds such as to make the SolarNavigator compliant when it comes to the International Regulations for Preventing Collisions at Sea 1972 and/or the Merchant Shipping (Distress Signals and Prevention of Collisions) Regulations 1996.
COMBAT
Should
the SolarNavigator enter a sensitive military zone, or suffer attention from pirates,
then the ability to distinguish between friendly and unfriendly interaction
could be vital to survival. In such a situation Hawkeye comes into its own,
enabling the craft to identify shipping while at a good distance and so decide
on evasive maneuvers well in advance of a potential dust up.
As with Johnny 5, the ability to interface with its surroundings brings SolarNavigator to life - in a robotic sense.
Point Gray Bumblebee2 2.5mm focal length, 648x488
pixels HFOV
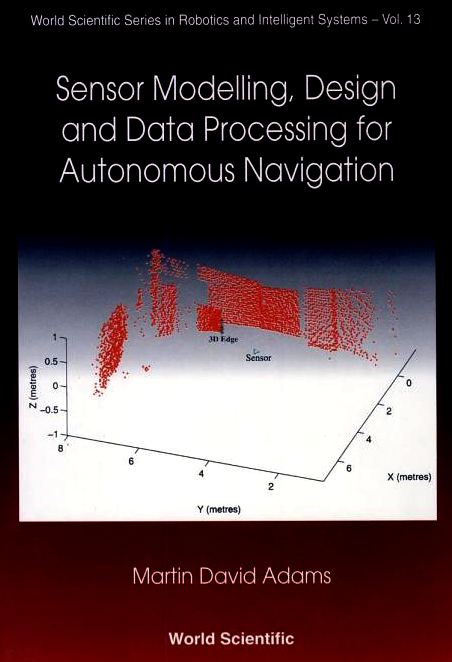
LASER RANGE FINDER
AUDIO INPUT & INDENTIFICATION
1. Voice recognition 2. Vessel recognition - horns, engines, etc. 3. Weather
TEMPERATURE SENSORS
Autonomy is all about doing something for humans, better than humans can.
RETURN TO MAIN AUTONOMOUS MENU
2. BRUCE THE AUTOPILOT & A BIT MORE 3. STAR WARS - DRONE SATELLITE REMOTE CONTROL, MANUAL OVERRIDE 4. HAL COMPUTER HARDWARE 6. THE EYES AND EARS - HAWKEYE 7. SELF DEFENCE - SCORPION 8. CAPTAIN NEMO - AI ROBOT 9. LOCAL NAVIGATION EVENT 10. INTERMEDIATE CIRCUMNAVIGATION 11. THE AUTONOMOUS CIRCUMNAVIGATION
LINKS
www.eng.uah.edu/~fahimi/Platform_Boat.html www.gps4us.com/GPS-independent-navigation-system-for-autonomous-vessels http://en.wikipedia.org/wiki/Geodetic_system http://en.wikipedia.org/wiki/ECEF www.apl.washington.edu/projects/seaglider/summary http://www97.homepage.villanova.edu/hashem.ashrafiuon
|
|||||||||||||||||||||||||||||||
|
This website is copyright © 2013 Electrick Publications. All rights reserved. The bird logo and names Solar Navigator and Blueplanet Ecostar are trademarks ™. The Blueplanet vehicle configuration is registered ®. All other trademarks hereby acknowledged and please note that this project should not be confused with the Australian: 'World Solar Challenge'™which is a superb road vehicle endurance race from Darwin to Adelaide. Max Energy Limited is an educational charity working hard to promote world peace.
|