|
DRIVETRAIN FOR SAFE AUTONOMOUS BOATS
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
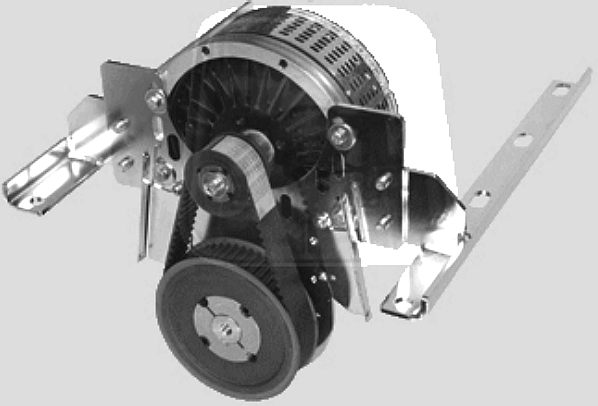
MOTOR
DRIVETRAIN CONFIGURATION - General
It follows that a large motor turning slowly while cruising, will not be in its efficient range, while a small motor spinning wildly trying to provide power for emergencies, will burn out and could fail physically. The paradox is that we want slow turning propellers, because propellers are in their most efficient range at slow revolutions. SolarNavigator's propeller will be spinning in the 500 rpm range while cruising. That is for a conventional rear mounted propeller. Post mounted static tests have shown that 70% + conversion of electrical energy to thrust is possible using a long narrow bladed propeller. Most boat propellers have difficulty achieving more than 50% efficiencies. They are just throwing energy away.
MATCHING MEDIUM
The way to match propeller rpm to motor rpm is to use a gearbox. But here again we have the problem of drag (mechanical losses) from all those meshing gears, bearings and lubricating oil. If that is, we used an automotive type gearbox. Automotive gearboxes are woefully inefficient, especially the automatic variety. CVTs are much better and Perbury boxes offer promising solutions, still far off for our purposes.
Chain drive is by far the most efficient @ 95% but needs lubrication for longevity. Belt drive is 90% efficient without lubrication, and the properties of the belt, lends itself to our need for flexibility and switch ability. We do not want lay-shafts soaking up energy idling in bearings as in conventional gearboxes. We want positive engagement and positive disengagement. Fewer moving parts and simplicity.
FLEXIBILITY
To make the most of excess energy at peak charge times and to use stored energy for the best range, it is sometimes necessary to engage a higher output motor with reduced gearing - when excess energy cannot be stored, and at other times, when running on stored energy for prolonged periods, to engage a lower output motor with higher gearing. The graph below makes this plain. A designer should aim to keep motor reduction ratio choice in the crimson band for peak efficiency. This is basic good design.
SECONDARY MOTORS
For an ultra reliable autonomous robot boat, we need back-up motors. If one motor set fails, we might engage another set. Compared to the long term energy savings, the additional setup costs are insignificant.
EMERGENCY MOTORS
Where we are cruising at relatively slow speeds, there are times when more power is needed, such as in tidal conditions, to avoid collisions, when docking, or just because we are late. By having the ability to engage and disengage motor sets without mechanical losses from layshafts and bearings, the SolarNavigator can operate at peak efficiency in real time. We cannot show you how we achieve this here because the method is patentable.
A GRAPH USED TO ESTIMATE BEST MOTOR REDUCTION RATIOS FOR DC MOTOR COMBINATIONS
ROBOTIC RELIABILITY
For an autonomous robot nothing is more important than dependability. Once a system fails there is no human to fix it.
STAND BY FAILSAFE
Should any one configuration fail, the proposed transmission design will allow several options to keep the craft powered with a greater degree of flexibility than most boats suffer when running as intended.
The SolarNavigator team hope to be able to run tests on as many of the above and report those findings to the marine community in the years ahead.
LINKS
Connect innovateuk vessel efficiency competition
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
This website is copyright © 1991- 2013 Electrick Publications. All rights reserved. The bird logo and names Solar Navigator and Blueplanet Ecostar are trademarks ™. The Blueplanet vehicle configuration is registered ®. All other trademarks hereby acknowledged and please note that this project should not be confused with the Australian: 'World Solar Challenge'™which is a superb road vehicle endurance race from Darwin to Adelaide. Max Energy Limited is an educational charity working hard to promote world peace.
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||