|
|
||||||||||||||||||||||||||||||
|
You have to start somewhere. Progress is measured from the first footstep to the last. The main thing is to plant that first footstep and now and again compare that to your last footstep. From that review you can decide in which direction to head, or if you have reached the ultimate design. We are not there yet, but know we are heading in the right direction, because of the hull configurations that we have built and tested.
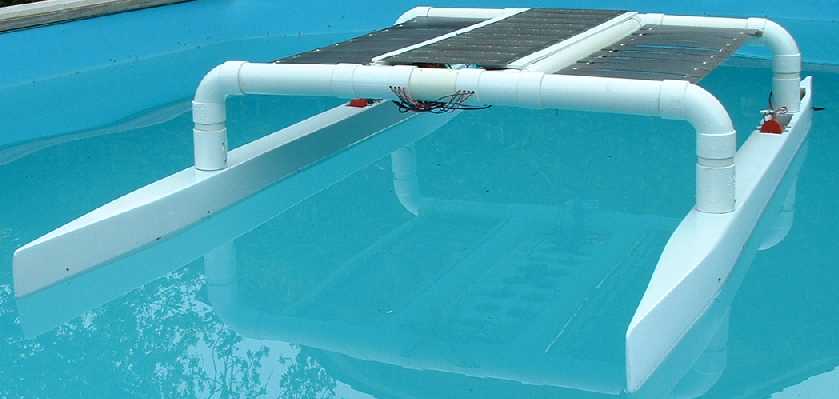
Tank testing new motors using temporary panel rig made of upvc plumbers piping
This older tank test catamaran hull is relatively stable transversely. The wave piercing design glides through the water leaving a noticeably reduced wake, but is prone to pitching in big waves. We learned from this model that there is room for improvement in the design.
We had already tried SWATH designs, which were far more stable heading into waves, with the drawback of increased drag. The near elimination of wave drag did not (unfortunately) offset the increase in surface area, bringing us back to the simple catamaran.
The hulls are joined by a test rig constructed of upvc plumbing piping. It is quick to make, cheap and easy to modify. Be sure to do a test fit and mark the positions of the pipes sections (dry) with pencil before applying the solvent cement. It sets in seconds, so there is no time for guesswork or measuring when final bonding.
Following this design, we tried a simple trimaran and again found there was room for improvement, but that a trimaran has some advantages over the catamaran, in reduced running drag in certain conditions. The problem being how to engineer a hull to obtain those conditions by design.
Our next objective is to build a hull that can trim itself for optimum low drag, yet still maintain a stable platform. The reason for this is not immediately obvious. In fact we had to do a whole bunch of calculations, until finally we realized that a stable hull is essential for a solar powered craft, and that the stability itself, linked with sun tracking would give us an overall increase in performance, from the increase in energy harvested. Nobody in the marine world seems to have either noticed or tried this out on a modified SWASH platform. To be able to build a hull that trims itself, an active hull, we have to enter the world of robotics big time.
MOTORS
Before fitting the aluminium spaceframe and full complement of panels, the new motor/drive configuration was tested using a number of different propellers and (voltage) wiring configurations. It is better to experiment on the test rig, until the set-up is finalized. By using a tank to conduct tests, performance increases are easier to detect and measure.
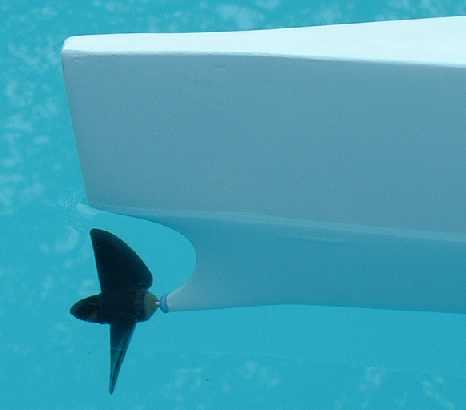
New Maxon motors in situ
Although the new dc motors can handle a lot more power and are more efficient, the best running configuration still has to be found. This is quite often discovered by trial and error (having done your sums first). Unfortunately, there is not a range of model propellers to cater for 'solar' applications. Therefore we have to make do and modify. We will be testing Kort and other configurations as time allows.
Testing 57.5 mm twin blade propellers
It is hoped that the combined technology will allow us to set model speed and endurance records (beat our own records) in the near future as part of our development of the full size vessel.
The Sun Tracker system is to be incorporated in the model for the first time, to ensure maximum energy collection from the solar panels, even though it would take a longer voyage to reap the benefit.
PROJECT HISTORY
In 1995 it was proposed by our designer that a solar powered boat would be able to circumnavigate the globe using only energy from nature. He displayed the first of his development models at the Earls Court boat show in London into 1996.
With a boat the most important component on the agenda is the hull. Solar powered boats provide marine architects with new challenges. There are as yet no conventions. Nobody knows what will work best, because so little has been put to the test. We can attest to that because we've tried 5 hull designs to date, improving on each one. Two SWATH designs (one above), two catamarans and a trimaran. The 6th design is not strictly speaking a trimaran, it does though have three hulls; so we're billing it as a trimaran. A hull design like this has not been built to date, to overcome the ever present drag and wave drag dilemma.
The other major challenge is panel design. How do you increase panel area and get as much of it facing the sun when the sun moves relative to the route, and of course keep the boat stable in all seas. We wanted at least 2 kilowatts per ton of vessel mass and can comfortably achieve that. Not to detract from the incredible achievements of the PlanetSolar team, but the SolarNavigator project aims to improve on the record 0f 585 days set in May 2012 with our brand new design. Our advantage is that we have more than twice the power to weight ratio of the current record holder with a lower drag hull. This needs to be verified before we can go to the construction stage.
This project represents a unique opportunity for any global company with eco friendly ambitions. If this is of interest to you please let Blueplanet Productions know using the contact details below. See the breathtaking video of PlanetSolar below to get a handle on the sort of publicity that Solarnavigator can generate.
On the 4th of May 2012 the theory was proven to be correct by Raphael Domjan and his superb boat the Turanor Planetsolar, thanks to generous sponsorship by Candido Swiss watches and Immosolar, leaders in the field of solar energy management.
Now the benchmark has been set, it will undoubtedly inspire others. As with so many things once a pioneer has shown the way, inevitably, the record stands like mountain to be scaled.
WE WILL PUBLISH DETAILS OF THE LATEST MODEL BUILD SHORTLY
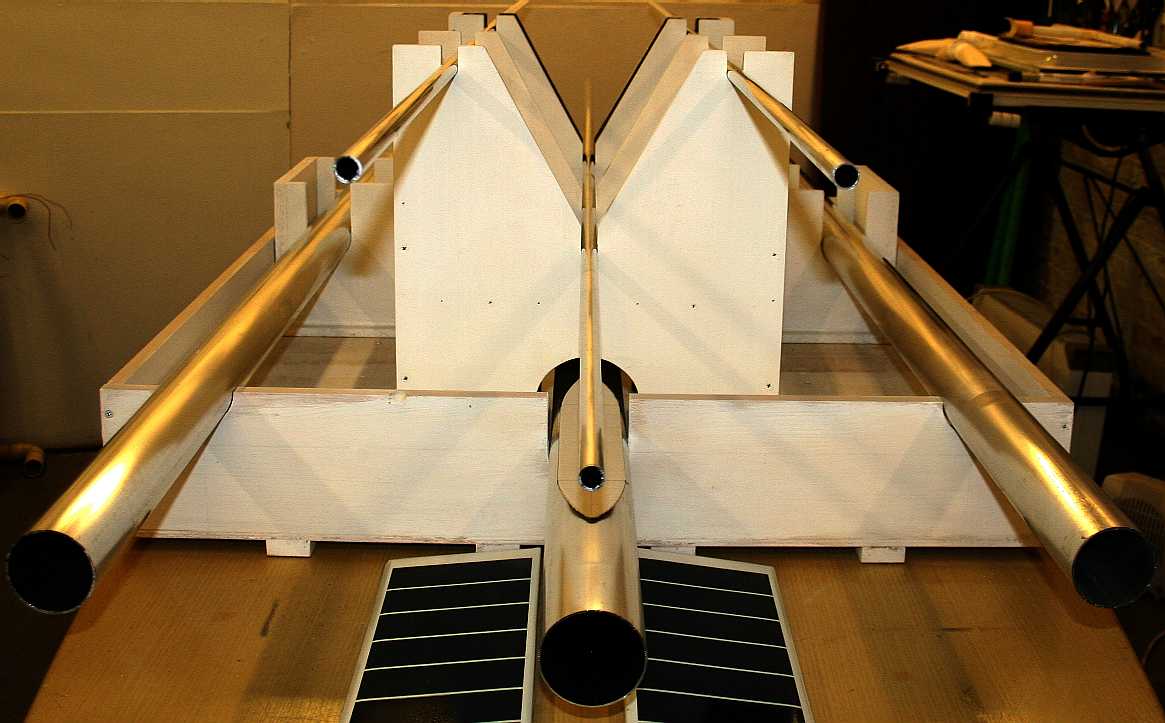
The latest autonomous boat is a battery electric trimaran with an extremely stable active hull that runs on solar power. Stability is essential to effective energy harvesting. The model shown here is just 150mm long. The radio controlled test model is 2.1 meters in length, which will also become a test-bed for basic collision avoidance, as part of an autonomous development programme. See the jig below.
The Jig for the Bluefish-SNAV development programme. A Jig is essential where accurate hull alignment is necessary and more than one model is to be built and tested. This way we can build a number of models in a series production run. This particular Jig is adjustable with sliding carriages to enable re-positioning of the active outriggers. The picture is © Copyright August 2013, but you may use it as a student for projects and reference without asking for permission.
|
||||||||||||||||||||||||||||||
|
This website is copyright © 1991- 2013 Electrick Publications. All rights reserved. The bird logo and names Solar Navigator and Blueplanet Ecostar are trademarks ™. The Blueplanet vehicle configuration is registered ®. All other trademarks hereby acknowledged and please note that this project should not be confused with the Australian: 'World Solar Challenge'™which is a superb road vehicle endurance race from Darwin to Adelaide. Max Energy Limited is an educational charity.
|