|
SONAR
|
|
|
SONAR (SOund NAvigation and Ranging) — or sonar — is a technique that uses sound propagation under water (primarily) to navigate, communicate or to detect other vessels. There are two kinds of sonar — active and passive. Sonar may be used as a means of acoustic location.
Acoustic location in air was used before radar. Sonar may also be used in air for robot navigation while SODAR (an upward looking in-air sonar) is used for atmospheric investigations. Acoustic emission measurements can also be made for crack detection.
The term sonar is also used for the equipment used to generate and receive the sound. The frequencies used in sonar systems vary from infrasonic to ultrasonic. The study of underwater sound is sometimes known as hydroacoustics.
History of sonar
Although some animals have probably used sound for communication and object detection for millions of years, the use by humans is first recorded by Leonardo Da Vinci in 1490. A tube inserted into the water was said to be used to detect vessels by placing an ear to the tube. In the 19th century an underwater bell was used as an ancillary to lighthouses to provide warning of hazards.
The use of sound to 'echo locate' underwater in the same way as bats use sound for aerial navigation seems to have been prompted by the Titanic disaster of 1912. The world's first patent for an underwater echo ranging device was filed at the British Patent Office by English meteorologist Lewis Richardson, one month after the sinking of the Titanic, and a German physicist Alexander Behm obtained a patent for an echo sounder in 1913. Canadian Reginald Fessenden built an experimental system in 1914 which could detect an iceberg at two miles range, though it was unable to say which direction the berg was in.
During World War I, with the need to detect submarines, more research into the use of sound was undertaken. The British made early use of underwater hydrophones, while the French physicist Paul Langevin, working with a Russian émigré electrical engineer, Constantin Chilowski, worked on the development of active sound devices for detecting submarines in 1915. Although piezoelectric and magnetostrictive transducers later superseded the electrostatic transducers they used, this work influenced the future of detection designs. Although modern transducers often use a composite material as the active part between a light head and a heavy tail, many other designs have been developed. For example, lightweight sound sensitive plastic film and fibre optics have been used for hydrophones (acousto-electric transducers for in-water use), while Terfenol-D and PMN have been developed for projectors. Piezoelectic composite materials are available from several manufacturers including Morgan Electro Ceramics.
In 1916, under the British Board of Invention and Research, Canadian physicist Robert Boyle took on the active sonar project, producing a prototype for testing in mid-1917. This work, for the Anti-Submarine Division, was undertaken in utmost secrecy, and used quartz piezoelectric crystals to produce the world's first practical underwater active sound detection apparatus. To maintain secrecy no mention of sound experimentation or quartz was made - the word used to describe the early work ('supersonics') was changed to 'ASD'ics, and the quartz material 'ASD'ivite. From this came the British acronym ASDIC. In 1939, in response to a question from the Oxford English Dictionary, the Admiralty made up the story that the letters stood for 'Anti-Submarine Detection Investigation Committee', and this is still widely believed, though no committee bearing this name has ever been found in the Admiralty archives.
By 1918, both the U.S. and Britain had built active systems, though the British were well in advance of the US. They tested their ASDIC on HMS Antrim in 1920, and started production of units in 1922. The 6th Destroyer Flotilla had ASDIC-equipped vessels in 1923. An anti-submarine school, HMS Osprey, and a training flotilla of four vessels were established on Portland in 1924. The U.S. Sonar QB set arrived in 1931.
By the outbreak of World War II, the Royal Navy had five sets for different surface ship classes, and others for submarines, incorporated into a complete anti-submarine attack system. The effectiveness of early ASDIC was limited by the use of the depth charge as an anti-submarine weapon. This required an attacking vessel to pass over a submerged contact before dropping charges over the stern, resulting in a loss of sonar contact in the moments prior to attack. The hunter was effectively firing blind, during which time a submarine commander was able to take successful avoiding actions. This situation was remedied by used of several ships cooperating together and by the adoption of "ahead throwing weapons", such as Hedgehog and later Squid, which projected warheads at a target ahead of the attacker and thus still in ASDIC contact. Developments during the war resulted in British ASDIC sets which used several different shapes of beam, enabling blind spots to be continuously covered. Later, acoustic torpedoes were used.
At the start of WWII British sonar technology was transferred to the US. Research on sonar and underwater sound was expanded greatly, particularly in the US. Many new types of military sonar were developed. These included sonobuoys, dipping/dunking sonar and mine detection sonar. This work formed the basis for post war developments related to countering the nuclear submarine. Work on sonar had also been carried out in many other counties, notably in Germany. This included countermeasures. At the end of WWII this German work was assimilated by Britain and the US. Sonars have continued to be developed by many countries, including Russia, for both military and civil uses. In recent years the major military development has been the increasing interest in low freqency active systems.
In World War II, the Americans used the term SONAR for their systems, coined as the equivalent of RADAR. In 1948, with the formation of NATO, standardization of signals led to the dropping of ASDIC in favor of sonar. ASDIC
AN/AQS-13 Dipping sonar deployed from an H-3 Sea King helicopter
Sonar performance factors
The detection, classification and localisation performance of a sonar depends on the environment and the receiving equipment, as well as the transmitting equipment in an active sonar or the target radiated noise in a passive sonar.
Sound propagation
Sonar operation is affected by variations in sound speed, particularly in the vertical plane. Sound speed is slower in fresh water than in sea water. In all water sound speed (sometimes called velocity though this is incorrect) is determined by its bulk modulus and mass density. The bulk modulus is affected by temperature, dissolved impurities (usually salinity), and pressure. The density effect is small. The speed of sound (in feet per second) is approximately equal to:
This is an empirically derived approximation equation that is reasonably accurate for normal temperatures, concentrations of salinity and the range of most ocean depths. Ocean temperature varies with depth, but at between 30 and 100 meters there is often a marked change, called the thermocline, dividing the warmer surface water from the cold, still waters that make up the rest of the ocean. This can frustrate sonar, for a sound originating on one side of the thermocline tends to be bent, or refracted, off the thermocline. The thermocline may be present in shallower coastal waters, however, wave action will often mix the water column and eliminate the thermocline. Water pressure also affects sound propagation. Increased pressure increases the density of the water and raises the sound speed. Increases in sound speed cause the sound waves to refract away from the area of higher sound speed. The mathematical model of refraction is called Snell's law.
Sound waves that are radiated down into the ocean bend back up to the surface in great arcs due to the effect of pressure on sound. The ocean must be at least 6000 feet (1850 meters) deep, or the sound waves will echo off the bottom instead of refracting back upwards, and the loss at the bottom reduces performance. Under the right conditions these sound waves will then be focused near the surface and refracted back down and repeat another arc. Each focus at the surface is called a convergence zone (CZ). This CZ is in the form of an annulus about the sonar. The distance and width of the CZ depends on the temperature and salinity of the water. In the North Atlantic, for example, CZs are found approximately every 33 nautical miles (61 km), depending on the season, forming a pattern of concentric circles around the sound source. Sounds that can be heard from only a few miles in a direct line can therefore also be detected hundreds of miles away. With powerful sonars the first, second and third CZ are fairly useful; further out than that the signal is too weak, and thermal conditions are too unstable, reducing the reliability of the signals. The signal is naturally attenuated by distance, but modern sonar systems are very sensitive, i.e. can detect despite low signal-to-noise ratios.
If the sound source is deep and the conditions are right, propagation may occur in the 'deep sound channel'. This provides extremely low propagation loss to a receiver in the channel. This is because of sound trapping in the channel with no losses at the boundaries. Similar propagation can occur in the 'surface duct' under suitable conditions. However in this case there are reflection losses at the surface.
In shallow water propagation is generally by repeated reflection at the surface and bottom, where considerable losses can occur.
Sound propagation is also affected by absorption in the water itself as well as at the surface and bottom. This absorption is frequency dependent, with several different mechanisms in sea water. Thus sonars requiring to operate over long ranges tend to utilise low frequencies to minimise absorption effects.
The sea contains many sources of noise that interfere with the desired target echo or signature. The main noise sources are due to waves and shipping. The motion of the receiver through the water can also cause low frequency noise, which is speed dependent.
Principle of an active sonar - send and return pings
Reverberation
When active sonar is used, scattering occurs from small objects in the sea as well as from the bottom and surface. This can be a major source of interference but does not occur with passive sonar. This scattering effect is different from that in room reverberation which is a reflection phenomenon. An analogy for reverberation is the scattering of a car's headlights in fog or mist. A high-intensity pencil beam will penetrate the fog; main headlights are less directional and result in "white-out" where the returned reverberation dominates. Similarly, to overcome reverberation, an active sonar needs to transmit in a narrow beam.
Target characteristics
The target of a sonar, such as a submarine, has two main charateristics that influence the performance of the sonar. For active sonar it is its sound reflection characteristics, known as its target strength. For passive sonar the target's radiated noise characteristics are critical. The radiated spectrum in general will consist of an unresolved continuum of noise with spectral lines in it, the lines being used for classification.
Echoes are also obtained from other objects in the sea such as whales, wakes, schools of fish and rocks.
Sonar countermeasures
Active (powered) countermeasures may be launched by a submarine under attack to raise the noise level and/or provide a large false target. Passive (ie non-powered) countermeasures include mounting noise generating devices on isolating devices and coating the hull of submarines.
SNAV - Long-range, High Endurance Unmanned Surface Oceanographic Survey Vessel Solar powered platform for 365 day a year operation.
Active sonar
Active sonar uses a sound transmitter and a receiver. When the two are in the same place it is monostatic operation. When the transmitter and receiver are separated it is bistatic operation. When more transmitters (or more receivers) are used, again spatially separated, it is multistatic operation. Most sonars are used monostatically with the same array often being used for transmission and reception, though when the platform is moving it may be necessary to consider a single transmitter/receiver as being operated bistatically. Active sonobuoy fields may be operated multistatically.
Active sonar creates a pulse of sound, often called a "ping", and then listens for reflections (echo) of the pulse. This pulse of sound is generally created electronically using a Sonar Projector consisting of a signal generator, power amplifier and electro-acoustic transducer/array, possibly with a beamformer. However, it may be created by other means, eg chemically using explosives or by using heat sources in thermoacoustics.
To measure the distance to an object, the time from transmission of a pulse to reception is measured and coverted into a range by knowing the speed of sound. To measure the bearing, several hydrophones are used, and the set measures the relative arrival time to each, or with an array of hydrophones, by measuring the relative amplitude in beams formed through a process called beamforming. Use of an array reduces the spatial response so that to provide wide cover multibeam systems are used. The target signal (if present) together with noise is then passed through various forms of signal processing, which for simple sonars may be just energy measurement. It is then presented to some form of decision device that calls the output either the required signal or noise. This decision device may be an operator with headphones or a display, or in more sophisticated sonars this function may be carried out by software. Further processes may be carried out to classify the target and localise it, as well as measuring its velocity.
The pulse may be at constant frequency or a chirp of changing frequency (to allow pulse compression on reception). Simple sonars generally use the former with a filter wide enough to cover possible Doppler changes due to target movement, while more complex ones generally include the latter technique. Today, pulse compression is usually achieved using digital correlation techniques. Military sonars often have multiple beams to provide all-round cover while simple ones only cover a narrow arc. Originally the latter was often scanned around mechanically but this was a slow process.
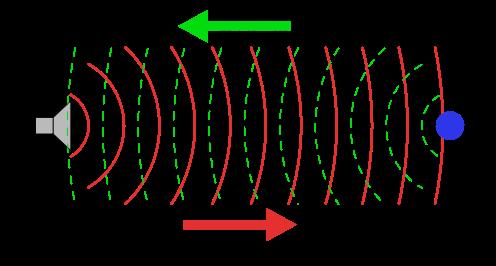
Particularly when single frequency transmissions are used, the Doppler effect may be utilised to measure the radial speed of a target. The difference in frequency between the transmitted and received signal is measured and converted into a velocity. Since Doppler shifts can be introduced by either receiver or target motion, allowance has to be made for the radial speed of the searching platform.
One useful small sonar looks roughly like a waterproof flashlight. One points the head into the water, presses a button, and reads a distance. Another variant is a "fishfinder" that shows a small display with shoals of fish. Some civilian sonars approach active military sonars in capability, with quite exotic three-dimensional displays of the area near the boat. However, these sonars are not designed for stealth.
When active sonar is used to measure the distance from the transducer to the bottom, it is known as echo sounding. Similar methods may be used looking upward for wave measurement.
Active sonar is also used to measure distance through water between two sonar transducers or a combination of a hydrophone (underwater acoustic microphone) and projector (underwater acoutic speaker). A transducer is a device that can transmit and receive acoustic signals ("pings"). When a hydrophone/transducer receives a specific interrogation signal it responds by transmitting a specific reply signal. To measure distance, one transducer/projector transmits an interrogation signal and measures the time between this transmission and the receipt of the other transducer/hydrophone reply. The time difference, scaled by the speed of sound through water and divided by two, is the distance between the two platforms. This technique, when used with multiple transducers/hydrophones/projectors, can calculate the relative positions of static and moving objects in water.
In wartime, emission of an active pulse is so compromising for a submarine's stealth that it is considered a very severe breach of tactics.
A very directional, yet low-efficiency type of sonar (used by fisheries, military, and for port security) makes use of a complex nonlinear feature of the water known as non-linear sonar, the virtual transducer being known as a parametric array.
Transponder
This is an active sonar device that receives a stimulus and immediately (or with a delay) retransmits the received signal or a predetermined one.
Performance prediction
A sonar target is small relative to the sphere, centred around the emitter, on which it is located. Therefore, the power of the reflected signal is very low, several orders of magnitude less than the original signal. Even if the reflected signal was of the same power, the following example (using hypothetical values) shows the problem: Suppose a sonar system is capable of emitting a 10000 W/m2 signal at 1m, and detecting a 0.001 W/m2 signal. At 100 m the signal will be 1 W/m2 (due to the inverse-square law). If the entire signal is reflected from a 10 sq m target, it will be at 0.001 W/m2 when it reaches the emitter, ie just detectable. However, the original signal will remain above 0.001 W/m2 until 300 m. Any 10 sq m target between 100 and 300 m using a similar or better system would be able to detect the pulse but would not be detected by the emitter. The detectors must be very sensitive to pick up the echoes. Since the original signal is much more powerful, it can be detected many times further than twice the range of the sonar (as in the example).
In active sonar there are two performance limitations, due to noise and reverberation. In general one or other of these will dominate so that the two effects can be initially considered separately.
In noise limited conditions at initial detection:- SL - 2TL + TS - (NL -DI) = DT where SL is the source level, TL is the transmission loss (or propagation loss), TS is the target strength, NL is the noise level, DI is the directivity index of the array (an approximation to the array gain) and DT is the detection threshold.
In reverberation limited conditions at initial detection (neglecting array gain):- SL - 2TL + TS = RL + DT where RL is the reverberation level and the other factors are as before.
Sonar and marine animals
Adverse effects
High-powered sonar transmitters may harm marine animals, although the precise mechanisms for this are not well understood. Some marine animals, such as whales and dolphins, use echolocation systems similar to active sonar to locate predators and prey. It is feared that sonar transmitters could confuse these animals and cause them to lose their way, perhaps preventing them from feeding and mating.
It has been suggested that military sonar may induce whales to panic and surface too rapidly leading to a form of decompression sickness. This was first raised by a paper published in the journal Nature in 2003. It reported acute gas-bubble lesions (indicative of decompression sickness) in whales that beached shortly after the start of a military exercise off the Canary Islands in September 2002.
In the Bahamas in 2000, a sonar trial by the United States Navy of transmitters in the frequency range 3 – 8 kHz at a source level of 223 – 235 decibels re 1 μPa (scaled to a distance of 1 m) resulted in the beaching of seventeen whales, seven of which were found dead. The Navy accepted blame in a report (see here) which found the dead whales to have experienced acoustically-induced hemorrhages around the ears. The resulting disorientation probably led to the stranding.
A kind of sonar called mid-frequency sonar has been correlated with mass cetacean strandings throughout the world's oceans, and has therefore been singled out by environmentalists as causing the death of marine mammals. International press coverage of these events can be found at this active sonar news clipping web site. A lawsuit was filed in Santa Monica, California on 20 October 2005 contending that the U.S. Navy has conducted sonar exercises in violation of several environmental laws, including the National Environmental Policy Act, the Marine Mammal Protection Act, and the Endangered Species Act. Full text of the lawsuit can be found at this active sonar information web site.
An imitation of the humpback whale's sonar was conducted in the redirection of Humphrey the whale, who deviated from his normal migration path to enter San Francisco Bay.
For serious deep-sea sportfishing, the Garmin GSD 26 (dual transceiver) takes high-definition targeting to a whole new level. With a compatible transducer, the GSD 26’s Spread Spectrum technology scans on multiple frequencies at one time, returning vast amounts of data to the receiver. As a result, you can expect precise, shallow-water-like target separation at much greater depths – up to 10,000 ft (3,000 m). A traditional fixed frequency mode allows you to manually adjust frequencies from 25 kHz to 210 kHz for enhanced targeting of specific fish species. You can also adjust transmit power from 300 W to 3 kW (depending on transducer) for even more control over your sonar returns.
Mitigation methods
Environmental impacts of the operation of active sonar are required to be carried out by US law. Procedures for minimising the impact of sonar are developed in each case where there is significant impact.
Passive sonar
Passive sonar listens without transmitting. It is often employed in military settings, although it is also used in science applications, e.g. detecting fish for presence/absence studies in various aquatic environments - see also passive acoustics and passive radar.
Identifying sound sources
Passive sonar, has a wide variety of techniques for identifying the source of a detected sound. For example, U.S. vessels usually operate 60 Hz alternating current power systems. If transformers or generators are mounted without proper vibration insulation from the hull or become flooded, the 60 Hz sound from the windings can be emitted from the submarine or ship. This can help to identify its nationality, as most European submarines have 50 Hz power systems. Intermittent sound sources (such as a wrench being dropped) may also be detectable to passive sonar. Until fairly recently, the identification of a signal was carried out by an operator using experience and training. Now computers may be utilised in this process.
Passive sonar systems may have large sonic databases, however final classification is generally performed manually by the sonar operator. A computer system frequently uses these databases to identify classes of ships, actions (i.e., the speed of a ship, or the type of weapon released), and even particular ships. Publications for classification of sounds are provided by and continually updated by the U.S. Office of Naval Intelligence.
Noise limitations
Passive sonar on vehicles is usually severely limited because of noise generated by the vehicle. For this reason, many submarines operate nuclear reactors that can be cooled without pumps, using silent convection, or fuel cells or batteries, which can also run silently. Vehicles' propellers are also designed and precisely machined to emit minimal noise. High-speed propellers often create tiny bubbles in the water, and this cavitation has a distinct sound.
The sonar hydrophones may be towed behind the ship or submarine in order to reduce the effect of noise generated by the watercraft itself. Towed units also combat the thermocline, as the unit may be towed above or below the thermocline.
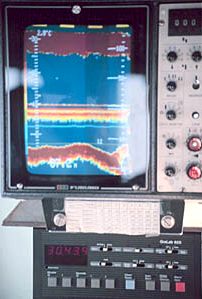
The display of most passive sonars used to be a two-dimensional waterfall display. The horizontal direction of the display is bearing. The vertical is frequency, or sometimes time. Another display technique is to color-code frequency-time information for bearing. More recent displays are generated by the computers, and mimic radar-type plan position indicator displays.
Performance prediction
Unlike active sonar, only one way propagation is involved. Because of the different signal processing used, the minimum detectable signal to noise ratio will be different. The equation for determining the performance of a passive sonar is given by Urick as :- SL - TL = NL - DI + DT where SL is the source level, TL is the transmission loss, NL is the noise level, DI is the directivity index of the array (an approximation to the array gain) and DT is the detection threshold.
The USS San Francisco's sonar array was damaged when the submarine ran aground
Sonar in warfare
Modern naval warfare makes extensive use of sonar. The two types described before are both used, from various platforms, i.e. water-borne vessels, aircraft and fixed installations. The usefulness of active versus passive sonar depends on the radiated noise characteristics of the target, generally a submarine. Although in WWII active sonar was mainly used, except by submarines, with the advent of noisy nuclear submarines passive sonar was preferred for initial detection. As the submarines have become quieter, active operation is now more used.
Active sonar is extremely useful, since it gives the exact position of an object. Active sonar works the same way as radar: a signal is emitted. The sound wave then travels in many directions from the emitting object. When it hits an object, the sound wave is then reflected in many other directions. Some of the energy will travel back to the emitting source. The echo will enable the sonar system or technician to calculate, with many factors such as the frequency, the energy of the received signal, the depth, the water temperature, etc., the position of the reflecting object. Using active sonar is somewhat hazardous however, since it does not allow the sonar to identify the target, and any vessel around the emitting sonar will detect the emission. Having heard the signal, it is easy to identify the type of sonar (usually with its frequency) and its position (with the sound wave's energy). Moreover, active sonar, similar to radar, allows the user to detect objects at a certain range but also enables other platforms to detect the active sonar at a far greater range.
Since active sonar does not allow an exact identification and is very noisy, this type of detection is used by fast platforms (planes, helicopters) and by noisy platforms (most surface ships) but rarely by submarines. When active sonar is used by surface ships or submarines, it is typically activated very briefly at intermittent periods, to reduce the risk of detection by an enemy's passive sonar. As such, active sonar is normally considered a backup to passive sonar. In aircraft, active sonar is used in the form of disposable sonobuoys that are dropped in the aircraft's patrol area or in the vicinity of possible enemy sonar contacts.
Passive sonar has several advantages. Most importantly, it is silent. Generally, it has a much greater range than active sonar, and allows an identification of the target. Since any motorized object makes some noise, it may be detected eventually. It simply depends on the amount of noise emitted and the amount of noise in the area, as well as the technology used. To simplify, passive sonar "sees" around the ship using it. On a submarine, the nose mounted passive sonar detects in directions of about 270°, centered on the ship's alignment, the hull-mounted array of about 160° on each side, and the towed array of a full 360°. The no-see areas are due to the ship's own interference. Once a signal is detected in a certain direction (which means that something makes sound in that direction, this is called broadband detection) it is possible to zoom in and analyze the signal received (narrowband analysis). This is generally done using a Fourier transform to show the different frequencies making up the sound. Since every engine makes a specific noise, it is easy to identify the object.
Another use of the passive sonar is to determine the target's trajectory. This process is called Target Motion Analysis (TMA), and the resultant "solution" is the target's range, course, and speed. TMA is done by marking from which direction the sound comes at different times, and comparing the motion with that of the operator's own ship. Changes in relative motion are analyzed using standard geometrical techniques along with some assumptions about limiting cases.
Passive sonar is stealthy and very useful. However, it requires high-tech components (band-pass filters, receivers) and is costly. It is generally deployed on expensive ships in the form of arrays to enhance the detection. Surface ships use it to good effect; it is even better used by submarines, and it is also used by airplanes and helicopters, mostly to a "surprise effect", since submarines can hide under thermal layers. If a submarine captain believes he is alone, he may bring his boat closer to the surface and be easier to detect, or go deeper and faster, and thus make more sound.
Examples of sonar applications in military use are given below. Many of the civil uses given in the following section may also be applicable to naval use.
Ship anti-submarine warfare (ASW) sonar
Until recently, ship sonars were usually with hull mounted arrays, either amidships or at the bow. It was soon found after their initial use that a means of reducing flow noise was required. The first were made of canvas on a framework, then steel ones were used. Now domes are usually made of reinforced plastic or pressurised rubber. Such sonars are primarily active in operation. An example of a conventional hull mounted sonar is the SQS-56.
Because of the problems of ship noise, towed sonars are also used. These also have the advantage of being able to be placed deeper in the water. However, there are limitations on their use in shallow water. These are called towed arrays (linear) or variable depth sonars (VDS) with 2/3D arrays. A problem is that the winches required to deploy/recover these are large and expensive. VDS sets are primarily active in operation while towed arrays are passive.
An example of a modern active/passive ship towed sonar is Sonar 2087 made by Thales Underwater Systems.
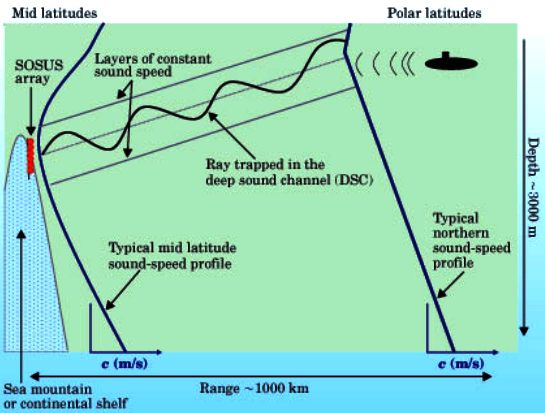
SOSUS ARRAY
The speed of sound in the ocean decreases as the water cools but increases with depth. In 1943, Maurice Ewing and Joe Worzel discovered the deep sound channel (DSC), an acoustic waveguide that forms by virtue of a minimum in that temperature−dependent sound speed. That minimum (plotted below as a dotted line) typically follows a path that varies from the cold surface at the poles to a depth of about 1300 meters at the equator. Because sound refracts toward lower sound speeds, ocean noises that enter the DSC oscillate about the sound−speed minimum and can propagate thousands of kilometers.
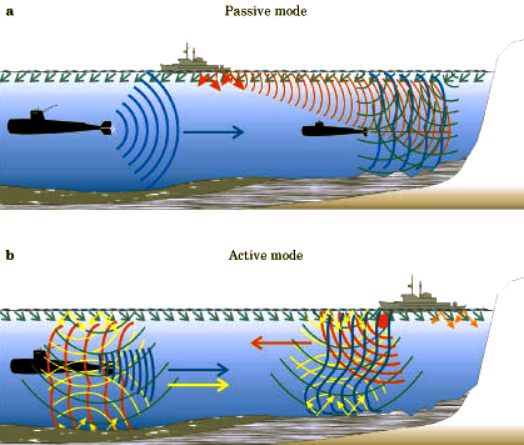
Sonar detection. (a) In this passive sonar scheme, the submarine on the right uses a towed array of detectors to distinguish sounds that originate from the one to the left. The towed array provides a large aperture to discriminate the desired signal (blue) that is distorted by the shallow−water environment and embedded in ocean surface noise (green) and shipping noise (red). (b) In active sonar, the ship sends out a pulse (red). Its echo (blue), distorted by the shallow−water environment, returns to the ship's receiver, which tries to distinguish it from backscattered reverberation (yellow) and ocean noise (green).
Torpedo sonar
Modern torpedoes are generally fitted with an active/passive sonar. This may be used to home directly on the target, but wake following torpedoes are also used. An early example of an acoustic homer was the Mark 37 torpedo. A submarine hunter such as the Predator, uses their wake to direct enemy torpedoes to the submarine that fired them.
Fisheries applications
Fishing is an important industry that is seeing growing demand, but world catch tonnage is falling as a result of serious resource problems. The industry faces a future of continuing worldwide consolidation until a point of sustainability can be reached. However, the consolidation of the fishing fleets are driving increased demands for sophisticated fish finding electronics such as sensors, sounders and sonars. Historically, fishermen have used many different techniques to find and harvest fish. However, acoustic technology has been one of the most important driving forces behind the development of the modern commercial fisheries.
Sound waves travel differently through fish than through water because a fish's air-filled swim bladder has a different density than seawater. This density difference allows the detection of schools of fish by using reflected sound. Acoustic technology is especially well suited for underwater applications since sound travels farther and faster underwater than in air. Today, commercial fishing vessels rely almost completely on acoustic sonar and sounders to detect fish. Fishermen also use active sonar and echo sounder technology to determine water depth, bottom contour, and bottom composition.
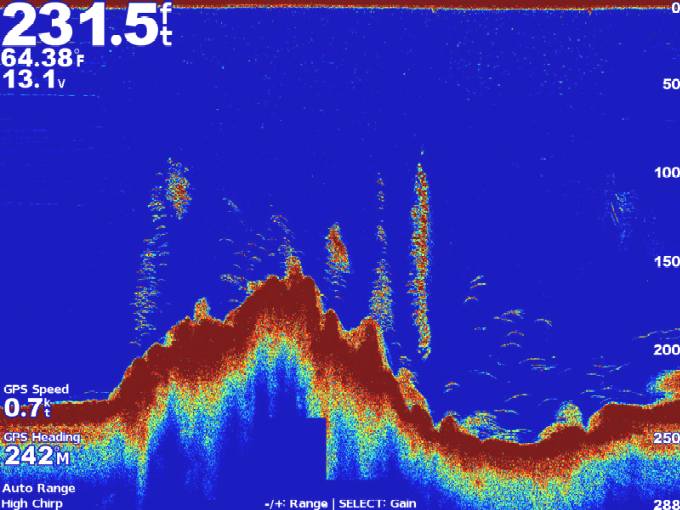
Cabin display of a fish finder sonar
Companies such as Marport Canada, Wesmar, Furuno, Krupp, and Simrad make a variety of sonar and acoustic instruments for the deep sea commercial fishing industry. For example, net sensors take various underwater measurements and transmit the information back to a receiver onboard a vessel. Each sensor is equipped with one or more acoustic transducers depending on its specific function. Data is transmitted from the sensors using wireless acoustic telemetry and is received by a hull mounted hydrophone. The analog signals are decoded and converted by a digital acoustic receiver into data which is transmitted to a bridge computer for graphical display on a high resolution monitor.
Echo sounding
An echo-sounder sends an acoustic pulse directly downwards to the seabed and records the returned echo. The sound pulse is generated by a transducer that emits an acoustic pulse and then “listens” for the return signal. The time for the signal to return is recorded and converted to a depth measurement by calculating the speed of sound in water. As the speed of sound in water is around 1,500 metres/second, the time interval, measured in milliseconds, between the pulse being transmitted and the echo being received, allows bottom depth and targets to be measured.
The value of underwater acoustics to the fishing industry has led to the development of other acoustic instruments that operate in a similar fashion to echo-sounders but, because their function is slightly different from the initial model of the echo-sounder, have been given different terms.
Net location
The net sounder is an echo sounder with a transducer mounted on the headline of the net rather than on the bottom of the vessel. Nevertheless, to accommodate the distance from the transducer to the display unit, which is much greater than in a normal echo-sounder, several refinements have to be made. Two main types are available. The first is the cable type in which the signals are sent along a cable. In this case there has to be the provision of a cable drum on which to haul, shoot and stow the cable during the different phases of the operation. The second type is the cable less net-sounder – such as Marport’s Trawl Explorer - in which the signals are sent acoustically between the net and hull mounted receiver/hydrophone on the vessel. In this case no cable drum is required but sophisticated electronics are needed at the transducer and receiver.
The display on a net sounder shows the distance of the net from the bottom (or the surface), rather than the depth of water as with the echo-sounder's hull-mounted transducer. Fixed to the headline of the net, the footrope can usually be seen which gives an indication of the net performance. Any fish passing into the net can also be seen, allowing fine adjustments to be made to catch the most fish possible. In other fisheries, where the amount of fish in the net is important, catch sensor transducers are mounted at various positions on the cod-end of the net. As the cod-end fills up these catch sensor transducers are triggered one by one and this information is transmitted acoustically to display monitors on the bridge of the vessel. The skipper can then decide when to haul the net.
Modern versions of the net sounder, using multiple element transducers, function more like a sonar than an echo sounder and show slices of the area in front of the net and not merely the vertical view that the initial net sounders used.
The sonar is an echo-sounder with a directional capability that can show fish or other objects around the vessel.
Biomass estimation
Biomass estimation uses sonar to detect fish, etc. As the sound pulse travels through water it encounters objects that are of different density than the surrounding medium, such as fish, that reflect sound back toward the sound source. These echoes provide information on fish size, location, and abundance. The basic components of the scientific echosounder hardware function is to transmit the sound, receive, filter and amplify, record, and analyze the echoes. While there are many manufacturers of commercially available “fish-finders”, quantitative hydroacoustic analyses require that measurements are made with scientific-quality echo sounder equipment, having high signal to noise ratios, and ability for easy calibration.
Vertical, or down-looking hydroacoustics has become increasingly important to the assessment of marine fish, anadromous and land-locked salmonids (Thorne 1971, 1979; Burczynski and Johnson 1986; Mulligan and Kieser 1986; Levy et al. 1991; Yule 1992; Parkinson et al. 1994; Beauchamp et al. 1997; Wanzenbock et al. 2003), and lake and reservoir fishes (Thorne 1983; Brandt et al. 1991; Degan and Wilson 1995; Vondracek and Degan 1995; Schael et al. 1995; Cyterski et al. 2003; Taylor et al. 2005).
Hydroacoustics provides a repeatable, non-invasive method of collecting high-resolution (sub-meter scale), continuous data along transects in three dimensions (MacLennan and Simmonds 1992). MacLennan and Simmonds (1992) as well as Brandt (1996) give a thorough introduction in the use of hydroacoustics for measuring fish abundances and distributions.
LINKS and REFERENCE
Fisheries Acoustics Research (FAR) at University of Washington http://www.acoustics.washington.edu/ NOAA Protocols for Fisheries Acoustics Surveys www.st.nmfs.gov/st4/protocol/Acoustic_protocols.pdf Fisheries Acoustics (2nd Edition) http://store.blackwell-professional.com/063205994x.html ACOUSTICS IN FISHERIES AND AQUATIC ECOLOGY http://www.ifremer.fr/sympafae/ Hydroacoustic Protocol - Lakes, Reserviors and Lowland Rivers www.pnamp.org//web/workgroups/FPM Profiling Sonar: Inspecting In-Service, Submerged Pipes http://www.eaglenav.com/Products/Fishfinders/
The ultimate Robot Boat. Solarnavigator uses an advanced SWASSH hull as the platform to mount the world's first autonomous circumnavigation. A successful expedition could pave the way for improved safety at sea.
|
|
| This website is copyright © 1991- 2013 Electrick Publications. All rights reserved. The bird logo and names Solar Navigator and Blueplanet Ecostar are trademarks ™. The Blueplanet vehicle configuration is registered ®. All other trademarks hereby acknowledged and please note that this project should not be confused with the Australian: 'World Solar Challenge'™which is a superb road vehicle endurance race from Darwin to Adelaide. Max Energy Limited is an educational charity working hard to promote world peace. | |
|
AUTOMOTIVE | BLUEPLANET BE3 | ELECTRIC CARS | ELECTRIC CYCLES | SOLAR CARS | SOLARNAVIGATOR |